2024年1月25日、情報通信研究機構(以下、NICT)は、中継用ドローンを経由させ、169MHz帯電波を使って約3.9kmの距離を通信接続し、見通し外を飛行するドローンを安全に制御する実証実験に成功したことを発表した。
ドローンの目視外飛行は、常に操縦者とドローンの間で無線通信がつながっていることが前提となっている。現状では、携帯電話圏内での運用か、海外の衛星通信システムを搭載するしか方法はなく、ドローン活用のニーズが高い山中などでは安全に飛行できるエリアが非常に限られているという課題があった。
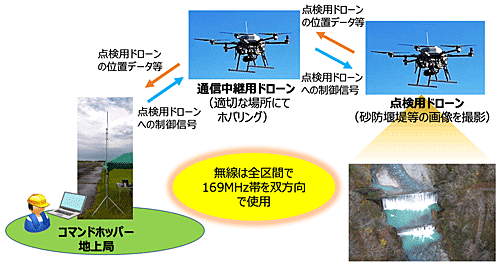
NICTは、障害物で直接電波が届かない見通し外を飛行するドローンに対し、中継用ドローンを経由して、従来使用されてきた2.4GHz帯電波に比べて遠くに飛ばすことができる169MHz帯電波で通信接続するマルチホップ中継制御通信技術(コマンドホッパー)の開発を進めてきた。
今回、山中の砂防堰堤(えんてい)の点検を想定した片道約3.9kmの屈曲した沢筋において、見通し外かつ携帯電話圏外で同技術を使用し、全飛行経路においてドローンを制御・監視することに成功した。
同技術は、見通し外かつ携帯電話圏外の山中などでの設備点検、捜索、災害調査など、レベル3飛行(無人地帯上空での補助者あり目視外飛行)以上でのドローン活用の拡大に役立つことが期待される。
169MHz帯電波はさらに長距離で通信できるポテンシャルを持つため、NICTは今後、山中だけでなく海上や災害現場での設備点検、捜索、災害調査、物流などにおけるドローンの実用化を目指すとしている。
実証実験の詳細
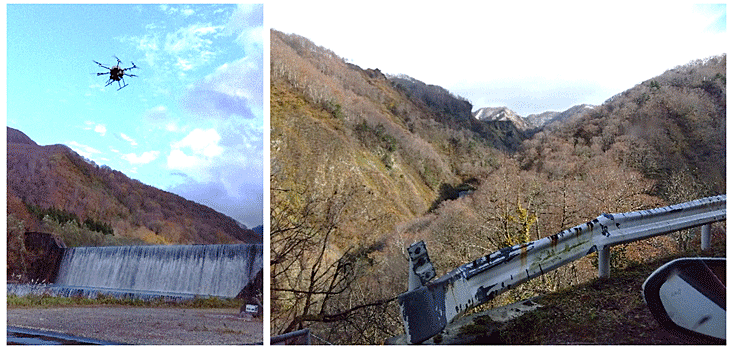
今回の実証実験は、山形県の月山山麓の立谷沢川沿いにおいて実施した。途中3カ所の砂防堰堤と1カ所のダム施設の映像を撮影しながら、対地高度約100mを維持して上流に向かって点検用のドローンを飛行させ、全ての撮影対象を通過後、安全に着陸させた。

この経路では、中間点付近から先は沢の屈曲により、ドローンを離陸させた場所にある地上局からの見通しがきかず、従来使用してきた2.4GHz帯電波では通信が途切れる状況であった。このため、飛行経路の途中、地上局から約1.8km上流の河床から高度約120mの地点に、中継用ドローンをホバリングさせた。この通信中継で、地上局から点検用ドローンへの制御信号送信と、その逆方向の位置情報受信の双方向通信を維持した。
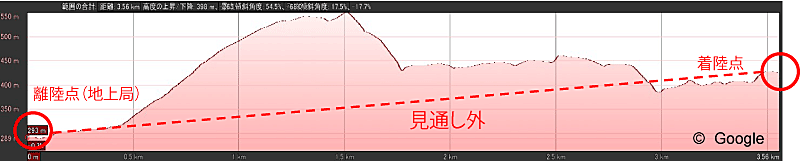
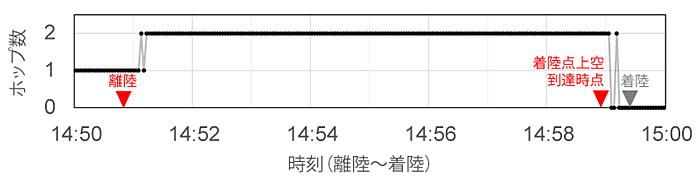
実験の結果、地上局からの見通しが全くきかない着陸点上空までの全飛行経路で無線通信を途切れることなく維持することができ、点検用ドローンを安全に飛行させることに成功した。飛行経路におけるホップ数は、着陸点上空までの全飛行経路でホップ数2を維持し、安定して通信できていることを確認した。
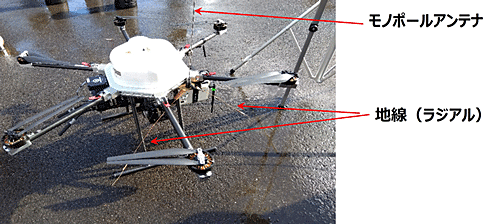
実験では、ドローンに搭載する169MHz帯のアンテナに改良を加えた。4分の1波長の長さのモノポールアンテナをドローンの中心胴体上に設置する従来の方法では、カーボン素材で構成されたドローンの胴体やプロペラアーム、脚部等の影響を受け、必ずしも良好な電波放射特性が得られず、ドローンの構造や向きによっては通信距離が想定より短くなるという問題があった。
これを改善するため、点検用ドローンと中継用ドローンの搭載アンテナにそれぞれ2本の地線(ラジアル)を追加。その結果、長距離で安定した中継用ドローン経由のホップ数2の通信特性を得ることができ、地上局から見通し外となるエリアにおいて、砂防堰堤の映像を取得することができた。
同技術により点検用ドローンとの通信エリアを拡大できるため、点検対象である砂防堰堤に、点検用ドローンを接近させて撮影することが可能になった。