2023年12月19日、戸田建設とSpiralは、2023年10月末に障害物検知センサーを搭載した非SLAM型自律飛行ドローンを共同で開発し、茨城県つくば市にある実大トンネルにて飛行検証を実施したことを発表した。
非SLAM型自律飛行ドローンは、機体に搭載されたカメラにより飛行指示の入ったマーカーを認識することで自律飛行を行う。この検証により、GNSS(全地球航法衛星システム)が届かず重機等が輻輳(ふくそう)する環境下においても自動で障害物を検知し、安全なルートを選択しながら飛行可能であることを実証した。
両社は自律飛行ドローンの現場実証を繰り返し、2025年度に実現場での本格運用を目指すとしている。


建設業では、少子高齢化に伴う技術者不足や危険箇所における災害抑止などの課題があり、目視点検や計測業務の省人化が求められている。両社は、山岳トンネルなどの非GNSS環境下での情報取得を自動化するため、これまでに自律飛行ドローンを用いた実証実験を3回実施。ドローンが撮影する画像を中心としたデータ取得や、坑内設備の位置情報が把握できることの確認など、実現場への導入に向けた準備を進めてきた。
重機類など坑内設備の位置が日々変化する動的環境に対応するため、両社は具体的な現場のニーズをもとに障害物検知センサーを搭載した機体を開発し、トンネルにおけるデータ取得の自動化を推進する。
今回、動的環境への対応として、茨城県つくば市にある実大トンネル実験施設内において、障害物検知センサーと障害物回避システムを搭載したドローンを用いた飛行実験を行った。
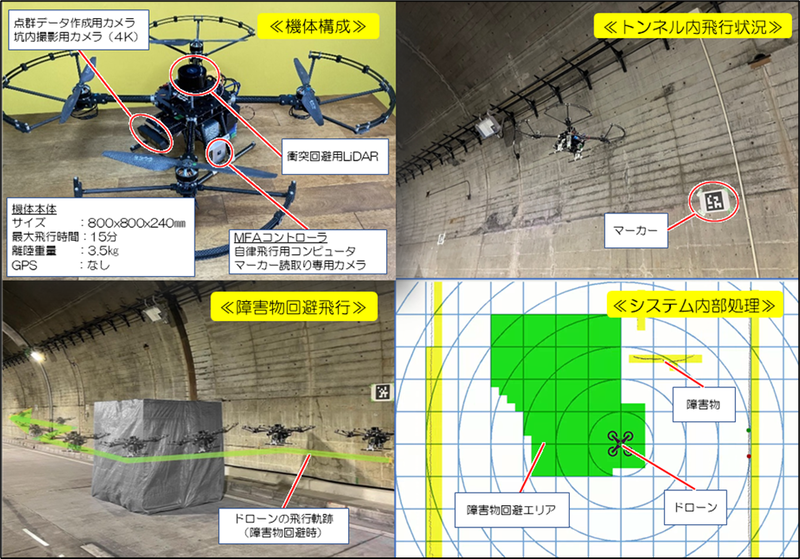
自律飛行における制御機構は、Spiralの「MarkFlexAir」を使用した。ドローンとマーカーのみで自律飛行が可能で、飛行中に操縦機や遠隔操縦システム等による制御は不要。障害物検知センサーにより、自動で障害物を検知・回避しながら定められた飛行経路を維持する。
搭載カメラで撮影した画像(4K/30fps)は、Wi-Fiを介して専用アプリケーション上にアップロードできる。SLAM技術(※1)を必要としないため、照度が不足している等の理由で特徴点が少ない場所でも自律飛行が可能。山岳トンネルのような屋内暗所かつ障害物の多い場所での高速・長距離飛行を実現する。
検証では、障害物検知センサーを搭載したドローンの自律飛行システムを用いて、実大トンネル実験施設内において飛行の安定性や画像取得の確認を行い、速度7km/hで1800m区間の飛行に成功した。障害物回避飛行では、設置した障害物を避けながら定められた飛行経路を通過し、障害物検知センサーが正しく作動していることを確認した。
今回の検証により、非SLAM型自律飛行ドローンの安定的な飛行と、障害物検知センサーの正確性について一定の成果を確認できたことから、重機類が輻輳する実際の現場での実用性や、トンネル坑内の情報取得の高精度化が期待される。
今後は、現場での外乱影響が障害物検知センサーに及ぼす影響について研究・改善、また誤作動回避の設計を行うなど、精度向上と試験運用を進め、施工中のトンネル現場での本格運用を2025年度までに開始することを目指すとしている。
※1 SLAM:特徴点の距離と方向から自己位置推定と周辺地図作成を同時に行う技術。