2023年8月7日、Kudanと台湾に本社を置くVecow Co., Ltd.(以下、Vecow)は、新世代のモバイルマッピング開発キットの提供を開始したことを発表した。
今回共同開発したマッピングソリューションは、多岐にわたる業界において、正確で包括的な3D環境情報を取得したいという需要の高まりに応えるものだという。
両社は2023年7月に戦略的パートナーシップの拡大を発表しており、同開発キットの提供はその最初のマイルストーンとなる。

SLAMベースの3Dモバイルマッピングは、モバイルプラットフォーム(人間、車両、ロボット、ドローン等)が現場を移動する間に自動で3Dのデータを取得する。同技術は、スマートシティや都市計画、ICTを活用した建設、インフラの点検・保守、鉱業・採石業における備蓄管理、緊急対応や災害管理など、幅広い用途で活用することができる。
静止したレーザースキャナーを使用し、静的な現場の正確なデータ取得に時間を要するTLS(地上固定型のレーザースキャナー)ベースの3Dマッピングとは異なり、SLAMベースの3Dモバイルマッピングは、リアルタイムかつ効率的に広大な領域をマッピングすることができる。
しかし、SLAMベースの3Dモバイルマッピングは、モバイルセンサデータに内在するノイズや不確実性のため、一般的にTLSベースのアプローチほど正確ではなかった。このため、高速マッピングの利点を維持しながらTLSベースのアプローチの精度に近づけるためには、複数センサの融合(マルチセンサフュージョン)が可能な産業グレードのSLAMが重要になるという。
マルチセンサフュージョンの場合は特に、時間領域における全てのセンサデータを正確に整合させるために、時刻同期が大きな役割を果たす。このプロセスにより、センサの測定値と対応するランドマークや周辺環境における特徴との正確な関連付けが可能になり、データ処理中のエラーを効果的に減らすことができる。加えて時刻同期は、非常に重要な動き推定とループクローズ(※)検出の実現に大きく貢献し、その結果、SLAMベースのマッピングの精度、信頼性、および全体的な品質が大幅に向上することが期待できる。
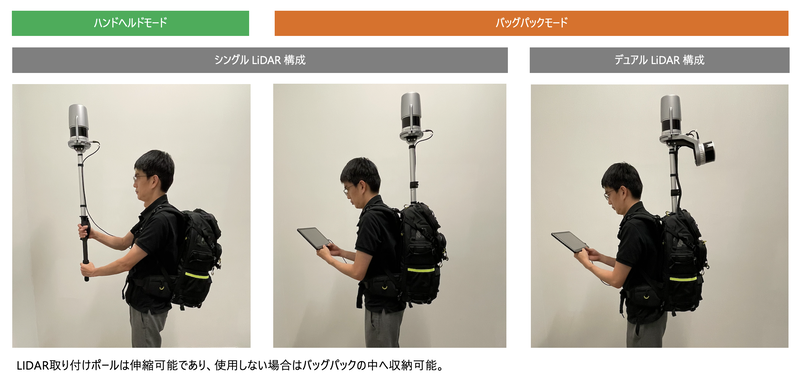
今回共同開発したマッピングソリューションは、バックパック/ハンドヘルドタイプの3Dマッピングデバイスで、Kudan独自の3D-Lidar SLAM(KdLidar)とマルチセンサフュージョン技術に加え、Vecowのロバスト性の高いVCM-1000Fコントローラを活用し、正確な時刻同期と効率的なコンピューティングを実現する。
※ループクローズ:過去に訪問した地点を再訪問する際に、推定された軌跡と地図の累積誤差を検出して修正するプロセス。
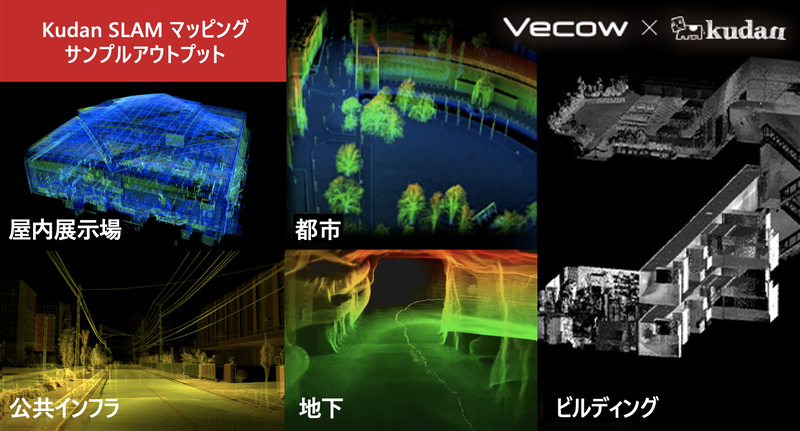
同マッピング開発キットは、GNSS非対応地域を含むさまざまな環境において、正確な3D点群を効率的かつ堅牢に生成する能力を備えているため、森林調査、ファサード調査、インフラ整備、地下調査、産業用デジタルツイン、設備資産管理、体積計測、ICT建設など、幅広い用途に適している。
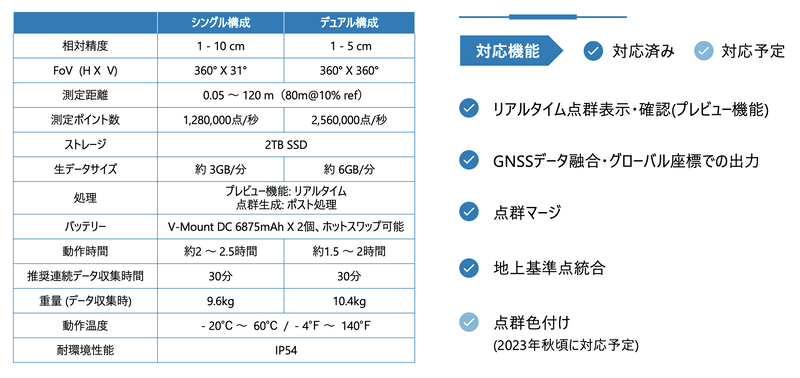
マッピング開発キットは、KudanStudioソフトウェアと組み合わせることでユーザーフレンドリーなインターフェースと合理化されたワークフローを提供し、専門的なスキルを必要とせず誰でも利用が可能。最大1cm未満の高精度な3D点群を迅速に生成する。また、同キットはデータの後処理における詳細なパラメータ設定をサポートし、特定のユースケースに応じたさまざまな密度やサイズの最適な3D点群の作成を容易にするとともに、元の生データを保持して再利用性を確保する。マップハンドリング機能を搭載することで、複数の点群データのシームレスな結合を自動化し、効率的な点群整備と広域でのデータ活用の実現に貢献するとしている。

<Kudan/Vecowのモバイルマッピング開発キットの仕様詳細>