2023年3月31日、A.L.I. Technologies(以下、A.L.I.)は、国土交通省都市局が主導する「Project PLATEAU(以下、プロジェクトプラトー)」の一環として、山梨県甲府市においてSLAM技術と3D都市モデルを活用したドローンの自律飛行システムに関する取り組みを実施、完了したことを発表した。
2020年度より国土交通省都市局が主体となり、3D都市モデルの整備・活用・オープンデータ化を目的としたプロジェクトプラトーが開始された。A.L.I.は立ち上げ初年度から3D都市モデルにおけるドローンを活用したユースケースを創出する取り組みに参加してきた。
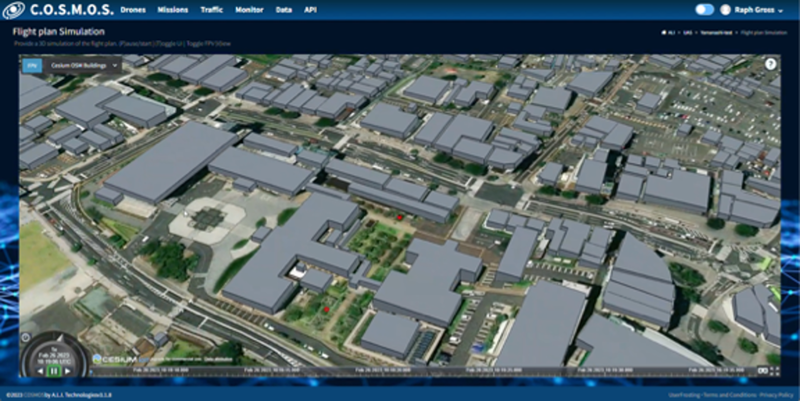
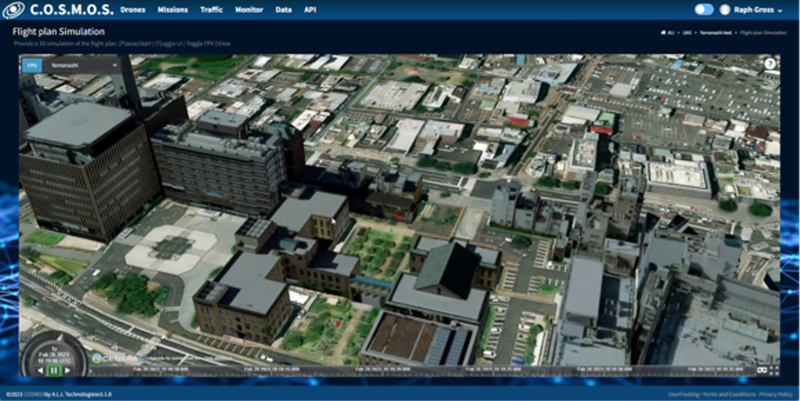
過去の取り組みでは、プロジェクトプラトーの立体情報を持った都市空間の中で、都市の空域を飛行するドローンのフライトシミュレーターを開発した。この技術を同社の運航管理サービスシステム「COSMOS(Centralized Operating System for Managing Open Sky)」に組み込むことで、ビル群が立ち並ぶ複雑な都市上空においてもドローンのオペレーションリスクを飛行前に検証することができる。安全が担保された航行ルートは、実際のフライトルートとして使用することも可能だという。

2022年12月の航空法改正により、ドローンの都市部(有人地帯)における補助者なし目視外飛行(レベル4)が解禁された。これに伴い、建物が密集した都市部においても安全な目視外飛行を実現するシステムが求められている。そこでA.L.I.は、SLAM(自己位置推定と環境地図作成)技術と同社が開発した自律飛行システムを組み合わせた飛行実証を行った。
実証実験について
プロジェクトプラトーの3D都市モデルはCityGMLというフォーマットで整備されている。今回は、すでにバーチャル空間上で都市が再現できている山梨県庁周辺のCityGMLデータを使用した。
一般的なドローンではGPSを使用して自己位置を把握していることが多い。しかしGPSでは受信状態や大気の影響、電波の反射(マルチパス)によって数メートルから数十メートル単位のズレが発生することもありえる。そのため、レベル4により都市部をドローンが飛び交うようになった状況において誤差が大きいGPSのみに依存すると、ドローンが周囲の建物にぶつかることが予想される。
そこで、ドローンに取り付けたLiDARセンサーとステレオカメラから取得した周辺のスキャンデータを使い、飛行中のリアルタイム周辺測位を実施。CityGMLデータとリアルタイム周辺測位の2つを照らし合わせることで、SLAM単体よりも精度が高く自己位置の推定を可能にするシステムの実証を行った。


市街地上空でドローンが飛行できることになり、今まで以上に安全に配慮した運用体制が求められている。ドローンの飛行においては手動飛行だけでなく、自律飛行中にも予定した航路から外れることがあるため、飛行ルートから外れた際に安全に危機を回避し、予定のルート上に復帰させる技術が求められる。これから活用が進む都市部では建物などの構造物が多いため、回避した先に別の危険因子があって重大な事故につながる可能性も考えられることから、高度なリスク回避技術が必要となる。
同実証で立証した3D都市モデルとSLAMを掛け合わせる技術と自律飛行システムを用いることで、こうしたリスクを軽減し、安心安全が担保されたドローンのオペレーションを実現するとしている。
