2021年11月29日、川崎重工は、同社開発の無人VTOL(垂直離着陸)機「K-RACER」と配送ロボットの連携による無人物資輸送の概念実証に成功したことを発表した。
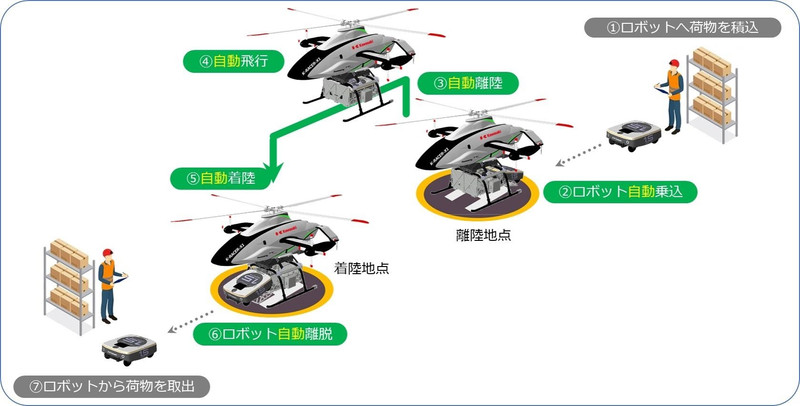
同実証では荷物を積載した配送ロボットが無人VTOL機に自動で乗り込み、配送ロボットを積載したままあらかじめ定められた経路を自動飛行。着陸後に配送ロボットが自動で離脱して目的地に荷物を届けるという一連のシーケンスを行った。これにより、将来的に人の手を介さない完全無人での荷物輸送を確認した。
無人VTOL機と配送ロボットの連携による無人物資輸送の概念実証(Kawasaki Group Channel)
無人VTOL機は2020年に飛行試験を実施した機体を改修し、ペイロード100kgを実現するとともに、配送ロボットとの連携機構を搭載。パワーユニットはカワサキモータースが製造するモーターサイクル「Ninja H2R」のスーパーチャージドエンジンを採用している。
配送ロボットは、荒れた路面や段差のある道路でも安定して走行する同社の配送ロボットをベースに、無人VTOL機への搭載が可能な車両を開発した。
無人VTOL機は今後、長野県伊那市から委託を受けて実施する「無人VTOL機による物資輸送プラットフォーム構築事業」でも使用する予定だという。
川崎重工は今回の知見を活かし、物流業界における労働力不足などの社会課題解決を目的に、道路交通状況や海山川などの地形特性に左右されない迅速な物資輸送や、山小屋や離島などへの安定した物資輸送のためのシステムを開発するとしている。
使用機体の仕様
| 無人VTOL機 | |
|---|---|
| 駆動方式 | レシプロエンジン型(Ninja H2R向けスーパーチャージドエンジン) |
| 飛行形態 | 垂直離着陸方式 |
| 制御方式 | 自動飛行 |
| ペイロード | 100㎏ |
| 配送ロボット | |
|---|---|
| 駆動方式 | 電動 |
| 制御方式 | 自律走行型 |
| 無人VTOL機との連携 | 無人VTOL機への接近・乗り込み・離脱含め全自動で連携 |