一般財団法人先端ロボティクス財団は、2024年7月24日から26日に東京ビッグサイトで開催された「メンテナンス・レジリエンス TOKYO 2024」における第10回国際ドローン展に参加。NEDOによる次世代空モビリティの社会実装に向けた実現プロジェクト「ReAMo」にて開発中の次世代オートパイロット技術を中心とした展示を行った。
高密度飛行を目指す次世代オートパイロット技術

次世代オートパイロット技術は、高密度飛行を目指した、エッジとクラウドのAIによる衝突回避と運航管理を実現するもの。これまでのナビケーションや自律飛行の制御は人でいうと小脳が司る機能に相当し、危険回避や飛行指示は操縦者が担当する。一方、次世代オートパイロットではリスク認知や自己監視と判断、障害物認知・回避など、大脳が司る誘導の機能を実現する。これが実現すれば操縦者は飛行指示を出すのみで、ドローンは飛行中の状況を自ら認識・判断して行動できるようになる。
担当者は「例えば、今私たちが電車の経路を調べるとき、自分の最寄り駅から目的地の駅までを入力するだけで、最安値や乗り換え回数が少ないルートが表示されます。しかし、ドローンで飛行する経路の場合、すべての経由地を手動で入力しなければなりません。これをAIが判断することで、電車の経路と同様に『ここからここまで行くのに最も近いのはこれです。ただし、このルートは風が強いから危険かもしれないので、風が弱いルートはこちらです』といった案内ができるようになります」と説明した。
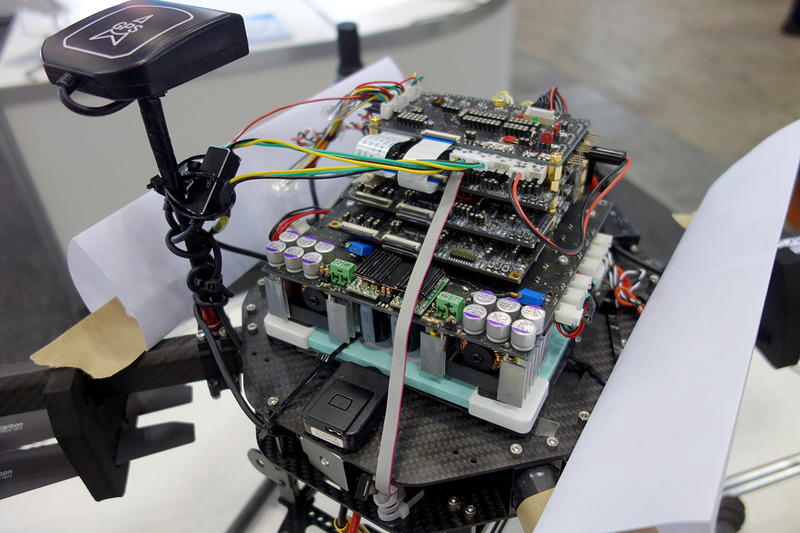
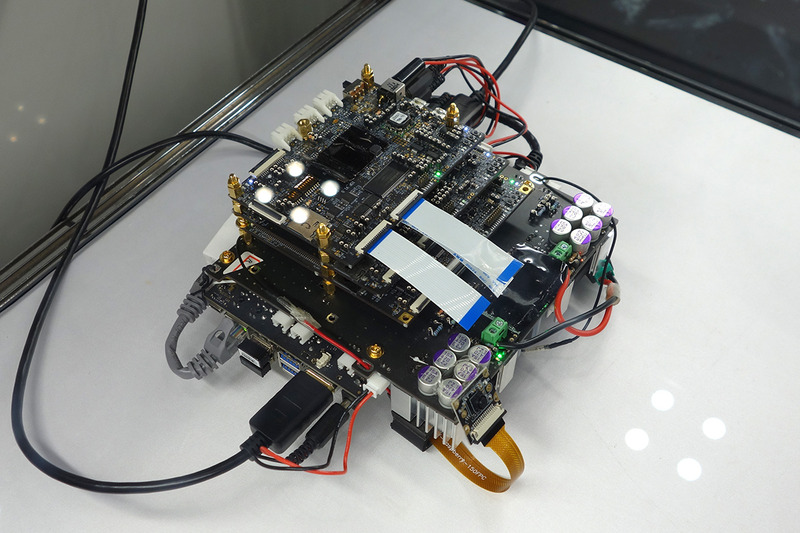
ブースでは制御システムが展示されていた。これは、大脳に相当する知能・認識・判断を担当するAIが搭載された基盤、小脳にあたる航法や運動の制御を行う基盤で構成されている。AIは気象や地理データなどの事前学習が必要だ。たとえば、「この地域はこの時間帯に風が強い」という情報を学習させておく。また、リアルタイム情報があれば、それを外部から取り込むこともできるが、基本的には過去のデータを基に判断する。リスク認知についても同様で、下に人がいるかどうかを判断するために学習させる。これまでは操縦者が「下に人がいるから危険だな、ドローンを避けよう」と判断していたが、これをAIが最初に判断して実行するようになる。
膨大なデータが鍵!AI学習の課題と飛行データ収集の重要性
本プロジェクトは2022年度から2026年度まで実施予定で、現在は有人機や無人機、鳥、建造物、送電線、樹木などを対象として高速で飛行しながらの衝突回避を実現する段階となっている。2025年度には飛行ルートの自動生成と最適ルートの探索、2026年度はエッジ(ドローン)とクラウド(運航管理システム)との連携システムの構築を目指している。

実現の鍵は、AIのための学習だ。担当者は「学習には膨大なデータが必要ですが、飛行できる場所や機会が限られていることが課題です。また、ドローンにはマルチローターや固定翼型、VTOL(垂直離着陸)型などいろいろあります。これらすべてのタイプに対応しなければ社会実装は難しいと考えています。さまざまなリスクに対応するために時間をかける必要があります」と語った。
「第11回 国際ドローン展」概要(次回2025年開催概要)
名称 :第11回 国際ドローン展
会期 :リアル展 2025年7月23日(水)~25日(金)10:00~17:00
会場 :東京ビッグサイト 東展示棟
主催 :一般社団法人日本ドローンコンソーシアム、一般社団法人日本能率協会
入場方法 :完全事前登録制(予定)。登録後発行される入場証を印刷し来場。
来場対象 :ドローンの開発・設計者/ドローンを活用したサービスのエンドユーザー(事業者)/ドローンを活用したい事業者(政府機関・自治体・研究機関・農業・警備・インフラ・メンテナンス関連)
URL :https://mente.jma.or.jp/structure/drone.html
メンテナンス・レジリエンス :https://mente.jma.or.jp/
2025年の出展申し込み :https://school.jma.or.jp/exhibition/entry/2025/menreji/