10月15日から18日の4日間、千葉県千葉市の幕張メッセでCPS/IoTと共創をテーマにした展示会「CEATEC 2019」が開催された。毎年10月に開催されているこの展示会は、日本企業が持つ最先端のエレクトロニクス技術を紹介する場として50年以上の歴史を持っているが、今回はそうした技術のひとつとしてドローンやその周辺技術の出展が見られた。
エアロネクスト
「4D GRAVITY」という特許技術を用いた独創的なドローンを次々と公開しているエアロネクストは、今回のCEATEC 2019で “空飛ぶゴンドラ” という新しいコンセプトのエアモビリティ「Next MOBILITY」を発表した。同社はこれまでにもジンバル等を用いてドローンの機体とペイロードを切り離し、飛行中のドローンの重心を制御することで、飛行の安定性やローター負荷の低減、ひいては信頼性の向上や低消費電力化を実現する技術をさまざまなドローンに用いてきた。
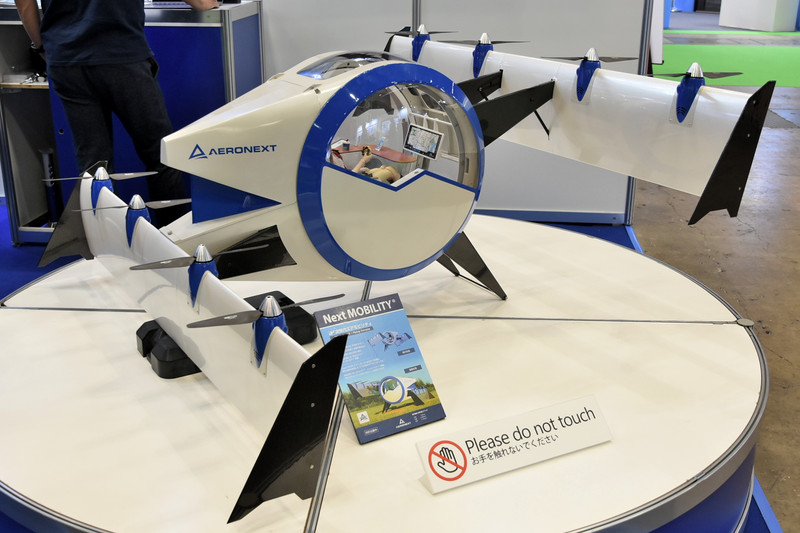
Next MOBILITYはこの重心制御技術を応用したエアモビリティの原理試作機だ。テールシットスタイルのVTOL機で、離着陸時は機体を垂直に立て、移動時は水平状態で飛行する。この離着陸と水平飛行で機体の姿勢が大きく変化するが、乗客が乗るキャビンを機体と切り離し、大きなリング状のベアリングで支持することで、キャビンが常に水平状態を維持し、快適な乗り心地を実現するというものだ。エアロネクストが「ティルトボディ」と呼ぶこのキャビンは、観覧車のゴンドラのようなイメージで、まさに “空飛ぶゴンドラ” である。


今回出展された機体のモックアップは、あくまでも原理試作機ではあるが、実際に飛行可能なモデルとなっている。「これまでにもテールシット機のアイデアは世界で提案されているが実用化には至っていない。それは主翼の研究が足りなかったから。エアロネクストでは今後この主翼に改良を加えながら開発を進めていく」(鈴木陽一取締役CTO)といい、来年にはその実機を公開したいとしている。
また、発表会でスピーチを行った田路圭輔代表取締役CEOは、「現在、世界中でエアモビリティの開発が進んでいるが、そのコンセプトはかなり先の未来を議論していると思う。エアロネクストでは “移動革命” の文脈でエアモビリティを考えるというより、もう少し手前にその答えがあると考えている」といい、現在のエアモビリティを実現するには安全性やバッテリーに起因する飛行時間の制限といった基本性能、さらには航空法や社会受容性といった、越えなければならないハードルがまだまだ存在するとしている。
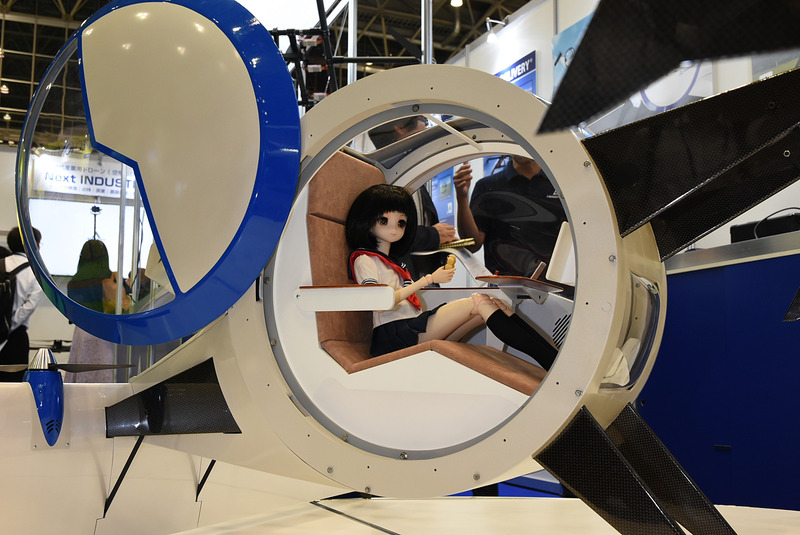
そこで「まずは航空機の移動とはまったく違う新しい移動を体験してもらうために、テーマパークのような一定の限られたエリアの中で観光目的などに運用するものとして、2023年をターゲットにしてこの “空飛ぶゴンドラ” の開発を進める」と田路氏。今回発表したモデルは1人乗りだが、今後早い時期に2人乗り、さらには乗客がすべて同じ向きに乗る4人乗りと開発を進め、いずれは向い合せに乗ることができる4人乗りのものを実現したいとしている。
また、エアロネクストではこのNext MOBILITYの他にも、開発が進む産業用ドローン、宅配用ドローンなどを展示。いずれも重心制御技術4D GRAVITYを駆使したこれまでにないドローンとなっている。


沖電気工業
「OKI」のロゴで知られる沖電気工業は、JR東日本、FPV ROBOTICS INC.と共同で開発した「ドローン搭載型MNB測深機」を参考出展として公開した。これはJR東日本が設立したJR東日本モビリティ変革コンソーシアムにおいて、河床状況調査の作業効率化と安全性向上に関する実証実験に用いているもの。
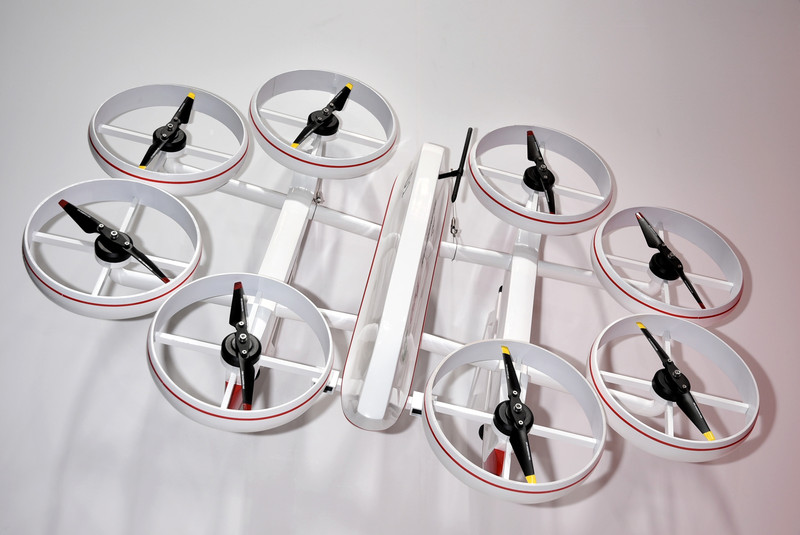

従来、河床調査にはソナーを用いた測深機を小型のボートに搭載して調査を行ってきたが、こうしたボートを水面に降ろす作業は、足場が悪かったり、河岸から水面までの高さがあったりするなど決して安全ではない。そこで、ドローンを使ってボートを測深する場所の水面まで飛ばして持っていくことで、こうした作業場の安全性を高めるというのが狙いだ。
今回公開した空飛ぶ水中測深装置は、ソナーを備えた小型ボートをドローンのフレームも兼ねたフロートが挟む形にレイアウトされた三胴船に8つのローターを備えた水空両用型。拠点から調査場所までの飛行や測深、帰還までの一連の作業を遠隔操縦もしくは自動航行で行うことができる。もともと沖電気工業では関連会社OKIシーテックが、可搬ボート型マルチビーム測深器「CARPHIN V」を販売しており、この測深装置を応用したもの。同社では今後実証実験を重ね、2020年後半に「CARPHIN air」として商品化することを目指している。
中日本ハイウェイ・エンジニアリング東京
主にNEXCO中日本の高速道路の保守を担っている、中日本ハイウェイ・エンジニアリング東京は、かねてから開発を行ってきた「構造物点検調査ヘリシステムSCIMUS」や、「小径管点検ロボットP-CIS」などを展示。高速道路の維持管理に、ドローンやロボットが使われていることをアピールしていた。

構造物点検調査ヘリシステムSCIMUSは、おもに橋梁を点検するドローンだ。SCIMUS-01、同02、同03と3つのタイプがあり、01は有線給電、有線操作タイプで、橋梁上から専用の懸架装置を使って機体を吊るす形で飛行させ、橋梁上部工(床板)や支承を点検する。02と03はバッテリー給電と無線操作という一般的なスタイルのドローンで、02はSLAMによる半自動飛行で橋脚などの点検を行い、03はトラスや鈑桁内にFPVで進入して撮影を行うためのものだ。

また、小径管点検ロボットP-CISは、直径800mm以下のパイプカルバート内を点検するロボット。四輪駆動の遠隔操縦車に360°カメラを搭載し、最高速度3m/sで走行しながら、パイプカルバート内を撮影して、ひび割れや土砂の堆積などを点検する。電源は有線給電としており、最大で100mの距離を進むことができる。
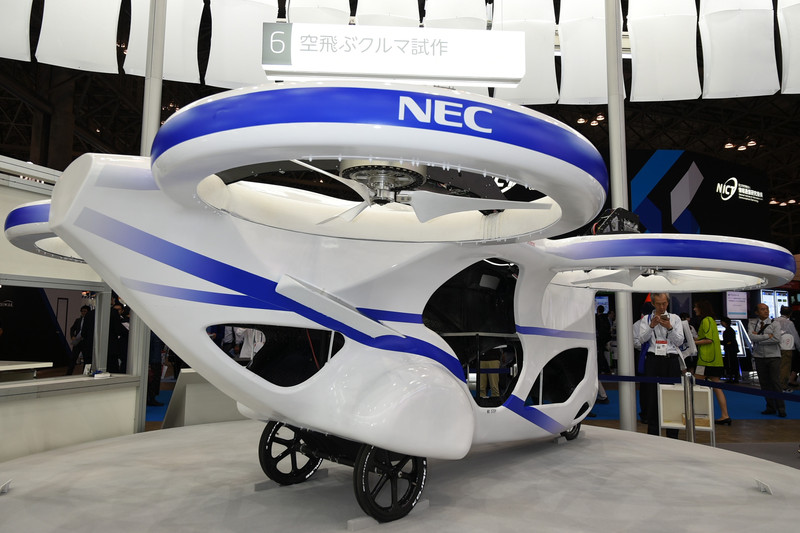
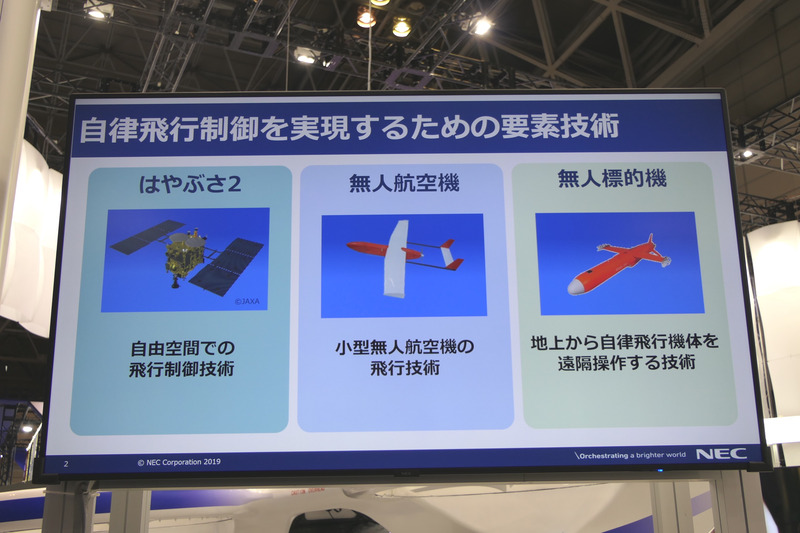
NEC
NECは今年8月に浮上実験に成功した空飛ぶクルマの実機を展示。全長約3.9×幅約3.7m×高さ1.3mの巨大な機体は、同社のブースの中でもひときわ目を引く存在感を放ち、多くの来場者の関心を集めていた。この機体は同社の衛星運用システムなどで培ってきた飛行制御技術などを生かして開発したもの。NECは航空管制システムを手がけており、将来的にはドローンやエアモビリティの管制システムを担うべく関連技術の開発を行っており、「そのためにはまず “飛ぶこと” を知るために、実際に飛ぶ機体を作る」(説明員)という狙いでこの機体を開発したという。