2026年1月21日、FullDepth(以下、フルデプス)は、内閣府の「戦略的イノベーション創造プログラム(SIP)第3期:海洋安全保障プラットフォームの構築」において、東京大学生産技術研究所および海上技術安全研究所と連携し、国産小型AUV(自律型無人潜水機)の実海域実証試験に成功したと発表した。
洋上風力発電は将来の主力電源として期待される一方、維持管理(O&M)における海底ケーブル点検等では、潜水士の不足や安全リスク、専用船の運用に伴うコストが課題となっている。フルデプスは、このプロジェクトにおいて、2人で運べるコンパクトなサイズ、クレーン不要の運用性を実現したパイロットモデルの開発と実証を担当した。

実海域における実証内容
神奈川県平塚沖の水深20m域において、実運用を想定した検証を実施した。
- 高精度な自律航行の検証
準天頂衛星「みちびき」によるGNSS測位を活用し、浮上時に位置誤差を定期的に補正。これにより高額な慣性航法装置を使用せずに正確な目標航路の追従を実現した。 - 運用形態の柔軟性
船上から操作可能な「ROVモード」と、テザーケーブルのない「AUVモード」の両面で試験を行い、直線やジグザグ等のウェイポイント(海中の目標点通過)航行を確認した。 - 実用的な稼働性能
カセット式バッテリーにより船上で迅速な交換が可能。実証では実稼働を想定した運用手順の改善を行った。
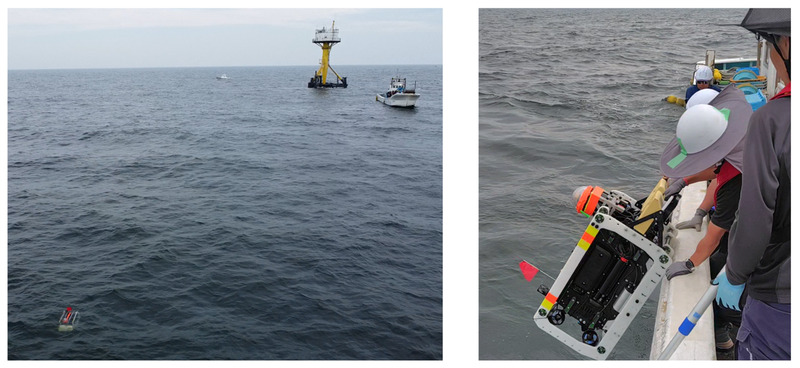
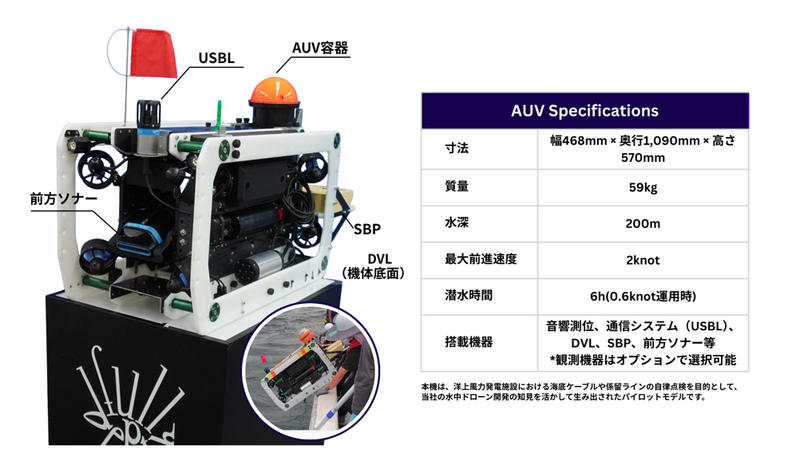
フルデプスが開発した小型モジュール型AUV「えぼし」
- クレーン無しで投入・揚収
大人2人で持ち運び可能な重量(59kg)で、クレーン等の特別な設備が不要。運用コストを大幅に抑制する。 - コストの優位性
従来の大型AUV・ROVシステムや特殊船と比較して導入・運用コストを抑制。効率的な点検と予防保全を可能にする。 - 自動航行による省人化
海底ケーブル上などの点検ルートを自動で移動。オペレーターの操縦なしで点検を実施し、少人数運用を実現する。 - モジュール化と高い拡張性
点検対象に応じてイメージングソナー等の音響装置の換装・アップグレードが可能。状況に応じてROVへ切り替えることができる。
フルデプスはMS&ADインシュアランスグループと連携し、洋上風力発電設備向け水中ドローン点検サービスを提供している。水中ドローンに搭載したカメラで撮影した映像データをもとに、風車水中部や海底ケーブル等の海中設備の状態を確認するほか、水中ドローンに搭載したイメージングソナー等による海底マッピングを行い、海底ケーブル等の海中設備の位置や状態を把握したうえで波や潮流等による影響の有無を調査する。同社は現在開発中の国産小型AUVも、将来的に同サービスへ適用させる方針だ。