2026年6月10日、九州旅客鉄道(以下、JR九州)とセンシンロボティクスは、鉄道特有の多様な環境条件に対応するため、複数の自律飛行モードを組み合わせ、1台のドローンで線路内を連続的に飛行する制御技術の開発・検証を行ったことを発表した。
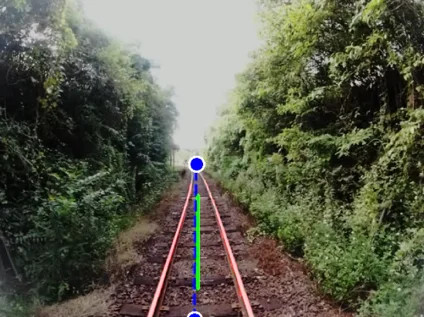
鉄道の線路内には、自律飛行に必要なGNSSが取得可能な区間だけでなく、トンネルや植生繁茂区間、踏切部など、環境条件が大きく異なる区間が連続して存在する。今回の取り組みでは、これらの環境の違いに対応するため、「GNSSモード」「レール追従モード」「トンネルモード」の3種類の自律飛行モードを開発・検証。飛行モードを状況に応じて自動的に切り替えることで、1台のドローンによる一気通貫の自律飛行が可能となることを確認した。


| 飛行モード | GNSSモード | レール追従モード | トンネルモード |
|---|---|---|---|
| 高度 | 25m | 2m | 2m |
| 速度 | 6m/s | 2m/s | 1m/s |
| 特徴 | ・高速・高高度で広域調査 ・事前に飛行経路設定が必要 ・設定地点で自動上昇・降下 | ・低速・低高度でレール追従 ・飛行経路設定が不要 ・非GNSS環境でも飛行可能 ・運転士目線で点検可能 | ・低速・低高度でトンネル飛行 ・飛行経路設定が不要 ・非GNSS空間を安定飛行 ・構造物認識で自動モード切替 |
| 適用技術 | ・LiDAR(点群取得) ・GNSS測位 | ・LiDAR(点群取得) ・AI画像認識 | ・LiDAR(点群取得) |
| 安全機能 | ・障害物回避自律降下 | ・障害物回避自律航行 | − |
この技術は、鉄道施設の維持管理における現地状況把握を補完する新たな手段となる可能性を有しており、気象異常時の安全点検や鉄道構造物の遠隔自律点検などへの活用が期待される。
両社は今後も継続的な技術開発と実証検証を進めるとともに、制度面や運用面、安全性についても検討を進めていく。また、鉄道インフラメンテナンス全体の効率化・高度化に資する技術として、鉄道事業者や関連企業との連携・協業も視野に、持続可能な開発・運用体制の構築を目指す方針だ。
