2026年5月8日、東日本旅客鉄道(以下、JR東日本)は、鉄道インフラの維持管理を高度化するため、線路内自律走行型ロボットによる線路点検の推進を発表した。
JR東日本グループは、グループ経営ビジョン「勇翔2034」に基づき、「AIとロボットを駆使した働き方改革」に取り組んでいる。開発中のロボットは鉄道線路上を自律走行し、カメラや各種センサーで線路やその周辺の映像・データを自動で取得。取得データを機体内に保存するとともに事務所内などの離れた場所にリアルタイムで送信する。AIが支障物の検知を補助し、異常の有無を係員が最終的に判断する。
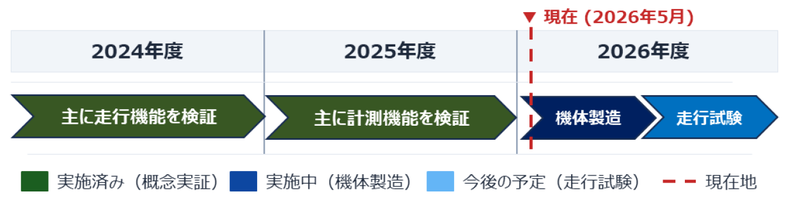
ロボットの開発は2024年4月に開始しており、2026年10月末までに実用化に向けた機体製作を行い、11月以降に実際の線路での走行試験を予定している。
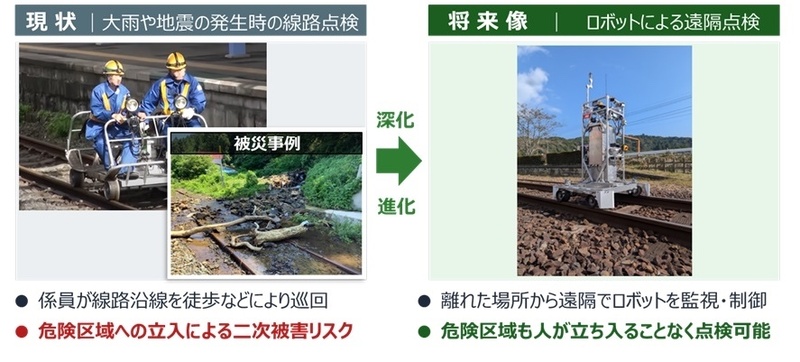
鉄道の維持管理業務には多くの労力を要しており、特に大雨や地震の発生時は係員が線路沿線を徒歩などで巡回し、列車の運行に支障を及ぼす事象が発生していないか目視で確認している。こうした作業は二次被害のおそれがあるほか、近年ではクマの出没増加による係員の安全確保も課題となっている。この状況に対応するため、事務所内などの離れた場所から点検作業を行える技術の確立に向けて、ロボットなどの遠隔操作・制御に関する研究開発を進めている。
【点検作業の比較】
| 比較項目 | 従来の方法(徒歩巡回) | ロボット導入後 |
|---|---|---|
| 点検方法 | 係員が線路沿線を徒歩などで巡回し、目視で列車の運行に支障を及ぼす異常の有無を確認 | ロボットが線路上を自律走行し、取得したデータを係員がリアルタイムで確認して、列車の運行に支障を及ぼす異常の有無を確認 |
| 取得データ | 係員の目視結果を記録(紙・端末への手入力) | カメラ・センサーにより映像・データを一括で取得 |
| 異常検知 | 係員の経験・知見に基づく判断 | 補助的にAIが自動解析し、線路内の支障物を検知、最終判断を係員が実施 |
| 安全面 | 獣害リスク・災害時の危険区域立ち入りなど、点検者への身体的なリスクがある | 係員は離れた場所にいながら点検ができ、人の危険区域立ち入りを減らす |
| データ蓄積 | 点検結果の記録が中心 | 走行ごとにデータを蓄積し、設備管理に活用 |
2024年4月よりPreferred Robotics(プリファード ロボティクス)と開発を開始し、概念実証を2段階にわたって行い、八高線など計6線区で実証実験を実施してきた。今回開発しているロボットは、線路上を自律走行し、搭載したカメラやLiDAR、GNSSなど各種センサーから得た情報をもとに安全に走行する。走行中に取得した映像や各種データは機体内に保存するとともにリアルタイムで係員へ送信される。AIは線路周辺の支障物の検知を補助し、列車の運行に支障を及ぼす異常の有無は事務所内などの離れた場所にいる係員が最終的な判断を行う。

【基本仕様】
| 項目 | 仕様 |
|---|---|
| 外形寸法 | 全長0.8m×全幅1.2m×全高1.8m |
| 重量 | 約100kg |
| 最高走行速度 | 時速15km |
| 連続稼働時間 | 約3時間(バッテリー電動) |
| 走行可能条件 | 勾配35%以下、曲線半径100m以上 |
| カメラ(光学) | 線路および周辺環境の映像を自動取得 |
| LiDAR | 約30m先まで検知 距離精度土2cm |

今後、2026年10月末までに実用化に向けた機体製作を行い、11月以降、在来線を中心にさまざまな路線で走行試験を行う予定だ。
ロボットを活用することで、大雨や地震発生時の点検作業で係員が危険区域に立ち入る必要がなくなるほか、クマなどの野生動物に遭遇するリスクを回避するなど、働く環境の改革を実現する。
将来的には、取得した映像や3D点群データの設備管理への活用や、ドローンの発着機能の付加による線路周辺のより詳細な状況把握など、ロボティクスとAI技術を活用した鉄道インフラにおける維持管理業務の高度化を目指す方針だ。