2025年11月28日、前田建設工業は、熊本市上下水道局と管清工業と連携し、熊本市下水道管路施設包括的維持管理業務委託(以下、熊本市下水包括)において、硫化水素の生成から劣化までをシミュレーションで診断する「硫化水素劣化予測診断技術」および管路内から管路周辺の空洞を無人で調査する「空洞点検ロボット技術」の実証を、2025年9月より開始したと発表した。中継ポンプ場、マンホールポンプ、伏越し部の合計79か所が対象となる。
硫化水素劣化診断技術では、WATSモデル(※1)を用いて微生物による管路の劣化予測を適切に評価する。空洞点検ロボット技術では、管路周辺の初期空洞を無人で計測する。実証でこの2つの技術の有効性を検証し、2026年3月頃の実用化を目指す。
※1 1990年代に国際水協会(IWA)によって提唱された硫化水素生成予測の手法。管渠内における好気・嫌気状態での有機物と硫黄化合物の変質に関するプロセスを考慮し、硫化水素生成の精度を向上させることを目的としたモデル。
硫化水素劣化予測診断技術
従来、硫化水素の劣化評価は、硫化水素濃度とコンクリート劣化速度の簡易評価式が主流であり、硫化水素の生成、硫化水素の硫酸化、管内温度依存を考慮した管路劣化予測は困難であった。
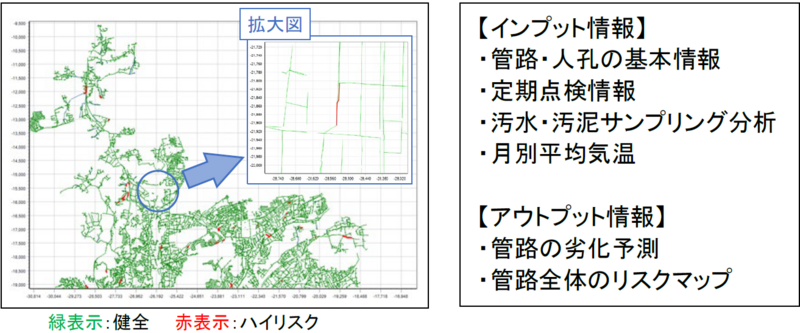
硫化水素劣化予測診断技術では、管路・人孔の基本情報(設置年度、材質、管径・深度、等)と、定期点検状況(劣化状況の進行)、汚水・汚泥のサンプリング分析(微生物の地域性)により、管路全体の劣化予測をシミュレーションし、劣化・老朽化のリスクを可視化する。今後、リスクに応じた管路の最適な更新・更生策定への活用を目指す。
空洞点検ロボット技術
従来の管路周辺の空洞調査は、路面から電磁波レーダー(適用深度2m程度)で行うため、検出された時にはすでに空洞が路面付近まで成長しており、緊急対応が必要であった。そのため、予防保全として初期空洞段階での検出が課題となっていた。
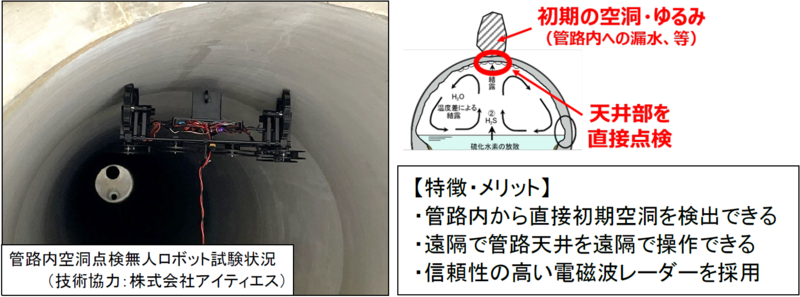
空洞点検ロボット技術は、管路内の天井部を走行する無人点検ロボットが、電磁波レーダーを用いて管路内から直接管路背面(管路の外側)の空洞を調査する。そのため、初期空洞を検出するだけでなく、調査員の立ち入りが困難な箇所も遠隔操作で安全に調査できる。また、硫化水素劣化予測診断で高リスクと判断された管路に対する予防保全のための状態監視技術としても期待される。
前田建設工業は、老朽インフラの維持管理について、これまでの定期点検による事後保全の管理に加え、劣化予測と状態監視を併用した予防保全の管理や、リスクとコストを総合的に判断した更新・更生の計画を地方自治体向けに提案していく考えだ。