2025年9月8日、シナノケンシ(ASPINA)は、フレームレスモーター「TQ-RoboDrive」を協働ロボットの関節アクチュエーターに組み込んだ活用事例を発表した。
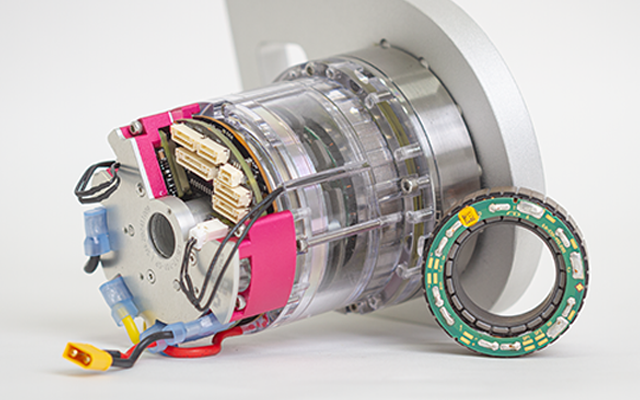
ドイツTQ社製フレームレスモーターのTQ-RoboDriveと、ロボット関節向け一体型モーションドライブユニット「SOMANET Circulo(ソマネットサーキュロ)」(以下、Circulo)を組み合わせた協働ロボットの関節アクチュエーターであり、TQ-RoboDrive ILM-E50×14とCirculo7の組み合わせでは、全体の直径が約75mm、高さ約110mmとコンパクトなサイズとなる。
トルク密度が高く、モーターフレームを排したTQ-RoboDriveと、ロボット開発に必要な機能を一体化したCirculoの組み合わせにより、高出力かつコンパクトな関節アクチュエーターを実現する。
協働ロボット向け一体型モーションドライブユニットCirculoは、ドイツSynapticon社の製品で、協働ロボットやサービスロボットなどの関節軸動作に必要な安全機能を一つの筐体に収め、装置の小型化・軽量化だけではなく、さまざまな部品の評価選定にかかる工数を削減する。専門知識がなくとも、エンコーダーのキャリブレーション、速度やトルクなどの調整、コギングトルクの調整などのモーター特性を最大限に引き出す専用のチューニングソフトを用意しており、ロボット開発工数を削減する。
【Circuloの特長】
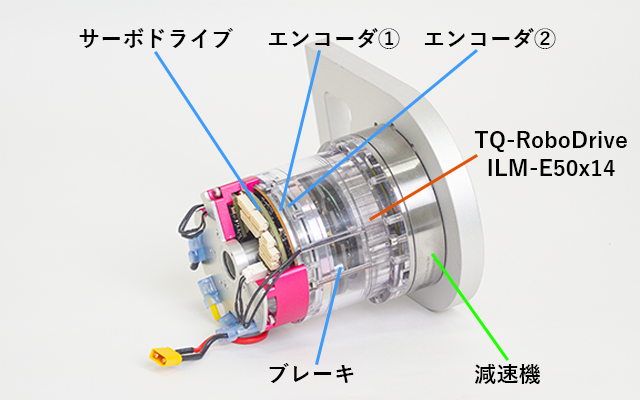
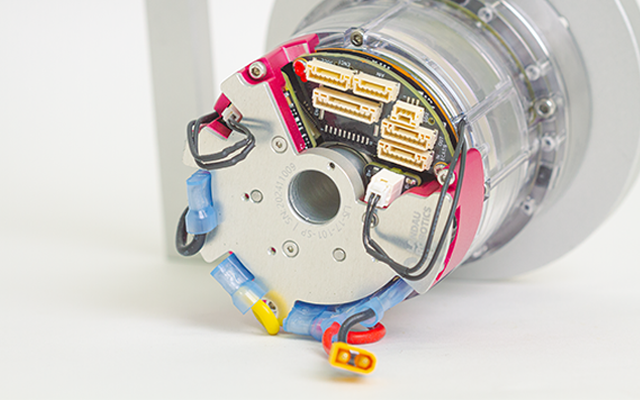
協働ロボットやサービスロボットなどの関節軸動作に必要なサーボドライブ、ブレーキ、エンコーダー2点(モーター側、減速機側)、安全機能を一体化。EtherCATによる省配線化などと相まって、通常のモーションドライブと比較して1/3程度まで小型・軽量化する。
デュアルエンコーダー方式を採用し、モーター側の位置に加えて、中空構造を利用してシャフト上に取り付けたエンコーダーを利用することで、減速機側の位置もフィードバックする制御系を構築可能。より高い位置決め精度を実現する。
STO(Safe Torque Off)やSBC(Safe Brake Control)といったロボットの安全制御に関わる機能をサポート。オプションのSafeMotionモジュールを用いることでIEC 61508やISO 13849などの機能安全規格の開発にも対応する。
これらの安全機能を活用することで、自作した協働ロボットの安全認証を円滑に取得できる。
【TQ-RoboDriveとCirculoの組み合わせ】
TQ-RoboDriveは、フレーム付きモーターよりも軽量でコンパクトな関節アクチュエーターを実現する。高いトルク密度、超低損失、放熱性と動的性能を備えており、限られたスペースで高い出力が求められるロボットの関節部などに適している。
また、フレーム(外枠)を持たない構造により軽量で、モーターのサイズや出力に合わせてロボットの外装を最適化できる。ロボット関節の動作に必要な機能を集約したCirculoと組み合わせて利用することで、ロボット全体を軽量化し、可搬重量(ペイロード)の増加に貢献する。