2024年12月9日、ヤマサは、信州大学工学部設計工学研究室、長野県松本工業高等学校(以下、松本工業高校)と協同で開発してきた次世代鳥獣被害対策ソリューション(いたずらネズミとお手伝いドローンプロジェクト)の実証実験を行い、鳥獣被害抑止のための一連の飛行動作に成功したことを発表した。

ネズミによる経済的被害はイノシシやシカに比べ少ないが、鳥インフルエンザなど家畜の伝染性疾病の媒介者ともいわれ、ペストコントロールの観点で対策が重要である。また、住居や建物など設備や機材に対する被害も広く知られている。
同プロジェクトでは、AIとドローンを活用してネズミを「検知・測定・牽制」することで、主に食糧倉庫などでの被害低減を図る「次世代鳥獣被害対策ソリューション」の開発を目指している。ヤマサと信州大学工学部設計工学研究室が主体となり、松本工業高校が協力する産学連携プロジェクトとして、2022年夏に始動した。
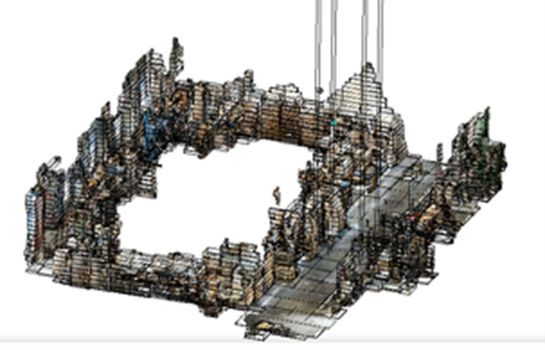
今回の実験は、検知・測定・牽制のうちの「牽制」パートを中心に実施。事前に飛行テストの屋内現場を3Dマップ化し、人を仮想鳥獣と見立て、AIが検出して自動でドローンが飛行。ドローンがダミー障害物の脇をすり抜けるような最適飛行経路を生成した。目的地に到達したドローンは仮想鳥獣に対して、威嚇行動を実施。行きのコマンドをもとに、スタート位置へ帰還する飛行コマンドを自動で作成して、実際に帰還飛行を行った。
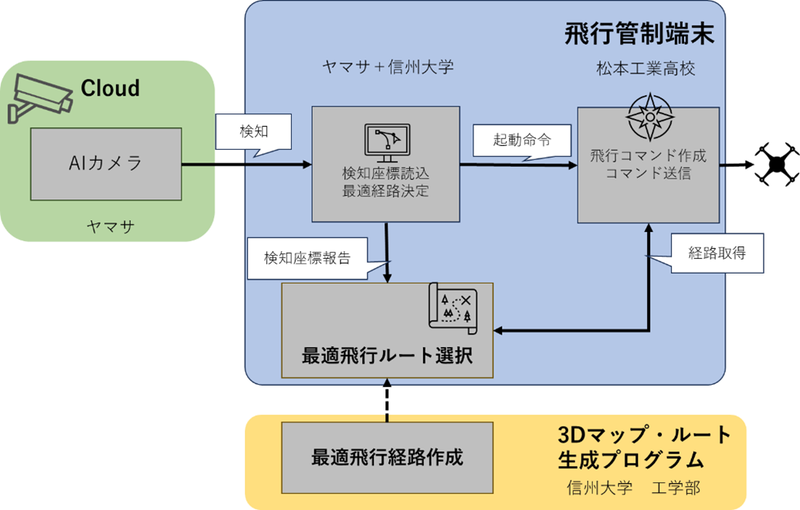
その結果、3者それぞれで構築したシステムの結合および実行に成功。AIの検知座標をもとに最適な飛行経路を決定し、ドローンを飛行させ、行きの飛行経路をもとに帰還用の飛行経路を自動的に作成、実行するという一連の流れを実証することができた。
今回の実験結果から、「屋内において、AI物体検知をトリガーとし、事前に撮影した3次元点群データをもとに計算された、最適経路を用いてドローンを飛行させる」プロジェクトが実現可能であることを確認した。ドローン到達点の精度や到達スピードなどは今後の課題となる。



【各者の役割】
| ヤマサ | <AIモデルの開発> ・教師データ収集、データセット作成 ・物体検出アルゴリズムを用いた独自モデルの開発 ・特定の地点(画角)に映るネズミを検知できるモデルの開発 <AIカメラシステムの開発> ・長時間稼働できるリアルタイム検知処理の開発 ・クラウドによるAI検知結果の配信 <システムインテグレーション> ・AI検知~ドローン飛行までの一連の処理を連携させるプログラムの開発 ・異なる言語で開発されたアプリ、処理間の連携 |
| 松本工業高校 | <ドローン飛行プログラムの作成> ・AIの検知信号をトリガーに発信し、3Dマップ上の目的地に向かって飛行し、帰還するプログラムの作成 <ドローン基地の開発> ・屋内で使用するドローン離着陸場の設計、開発 |
| 信州大学 | <3次元点群データ作成> ・iPadを用いた低コストな点群データの作成方法の提案と実証 ・実空間との誤差修正方法の提案 <飛行経路最適化> ・撮影した3次元点群データをもとに、格子点を設定し、障害物や飛行可能範囲を設定する処理(ボクセル処理) ・遺伝的アルゴリズムを用いた最適飛行経路データ導出プログラムの開発 ・AI検知座標(カメラ画角の2次元座標)から3次元点群データ座標(3次元座標)へと変換する方程式およびプログラムの作成と開発 ・複数の最適飛行経路データからAI検知座標をもとに1つを選択するプログラム(最適化経路決定プログラム)の開発 |