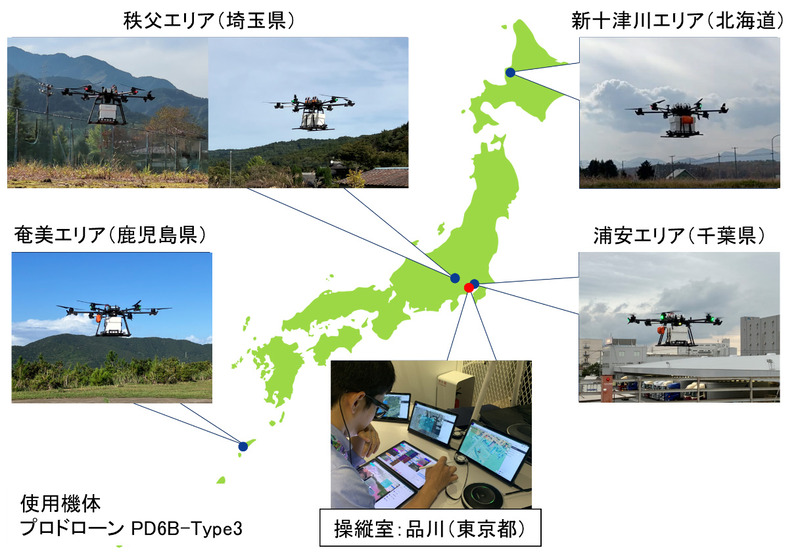
新エネルギー・産業技術総合開発機構(以下、NEDO)、KDDI、日本航空(以下、JAL)は、2024年10月28~31日、1人の遠隔操縦者が全国4地点で、計5機のドローンを同時運航する実証に成功したことを発表した。
この実証は、NEDO「次世代空モビリティの社会実装に向けた実現プロジェクト(ReAMoプロジェクト)」における「ドローンの1対多運航を実現する機体・システムの要素技術開発」の一環として実施したもの。
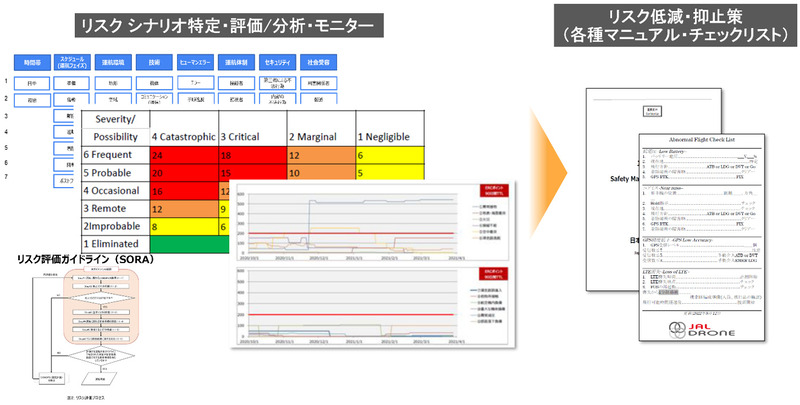
KDDIが多数機同時運航に対応した運航管理システムを開発、JALが航空安全に関わる知見・技術をもとにリスク評価を実施し、オペレーションの運用手順を策定した。特に、ヒューマンエラー防止のため、イレギュラー発生時の音声通知や操作の支援機能を運航管理システムに追加した点が特徴となる。
これにより1人の操縦者が全国4地点で計5機のドローンを安全かつ効率的に運航し、運航管理システムと運用手順の有効性を確認した。一方で、機体やシステムの不具合、運航環境の変化といったイレギュラーが同時に発生した場合の課題もわかり、今後のシステム機能や運航管理品質の向上に資するデータを取得できた。
今後、機体や運航管理システムのさらなる高度化(自動化・自律化)を前提に、操縦者の役割および運航管理体制も変化することから、今回の実証の知見を多数機同時運航に関する官民で取り組む制度設計にも役立てるとしている。
実証について
物流の2024年問題や生産年齢人口の減少に伴う労働力不足、社会インフラの老朽化、地域の過疎化や高齢化といった社会課題の解決に向けて、ドローンの社会実装や事業化が進んでいる。その実現のためには、限られた情報をもとに的確な状況把握・判断(モニタリング)が必要となる目視外遠隔自動運航技術の確立に加え、さらなる省力化・効率化に資する多数機同時運航など高度な運航管理が求められる。そのリスク評価と評価に応じた低減策を通じて、運航管理システムに関わる技術要件やオペレーションの運用手順を明確にしていく必要がある。
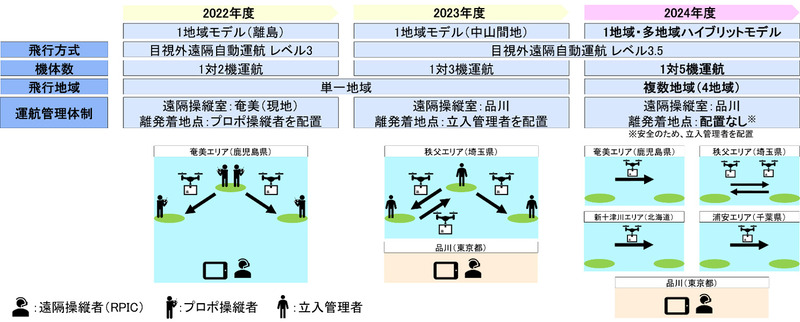
NEDOは2022年度から本事業で複数ドローンの同時運航実現に向けた運用要件の策定および運航管理システムの開発に向け、研究開発に取り組んでいる。
【研究開発項目】
1. 1対多運航のシステム要件およびオペレーション要件の検討
2. 1対多運航に対応した運航管理システム開発
3. 飛行実証に向けた許可承認の取得
4. 複数空域における複数機同時飛行を想定した飛行実証
5. 1対多運航の事業性検証
今回の実証では、飛行地点数を4地点に拡大し、1人の操縦者が遠隔操縦により、4地点で5機の同時運航を実現した。
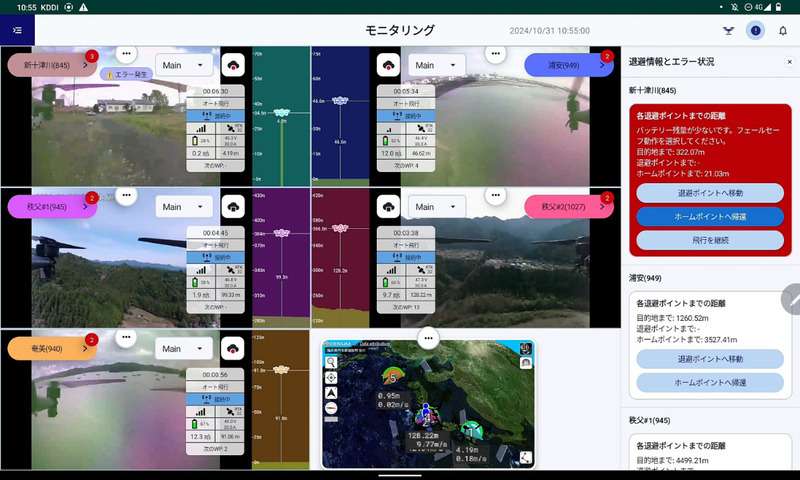
ドローンの遠隔自動操縦では、機体の運航状況や気象状況についてモニターディスプレイを通してリアルタイムかつ精緻に監視し、必要に応じ手動操作を加える高度な運航管理が求められる。今回の実証では、多数機の同時運航においてシステムの自動化と情報集約を進め、操縦者とシステム(マン=マシン・インターフェース)の役割分担を明確化した安全管理体制を構築した。
運航管理システムには、予期しない他機接近やバッテリー残量の低下などのイレギュラー発生時に、画面上のポップアップと音声により操縦者にわかりやすく通知し、対処方法をアドバイスする機能を追加した。これにより、イレギュラーが発生してもシステムの支援を受けて、あらかじめ定めたオペレーションマニュアルにのっとり、安全に運航を完了できることを検証した。
3者は、今後の体系的な要件定義においては、実証実験に加え仮想的な環境も活用したデータの蓄積と検証を進めていく。実証の知見を多数機同時運航に関する制度設計にも活用し、ドローンの社会実装に貢献するとしている。