ニコン・トリンブルは、米国Exyn Technologies社のモジュラー型3Dマッピング・ソリューション「Exyn Nexys(エクシン・ネクシス)」「Exyn Nexys Pro(エクシン・ネクシス・プロ)」の受注を2024年10月1日に開始した。

エクシン・ネクシスは、地上型ロボットや空中型ロボットに搭載して安全性が高く効率的な自律型マッピングを実行するのが特徴で、自動運転レベル4相当のLiDAR計測を実現する。
システムはパイロット制御の計測作業だけでなく、SLAMベースLiDARやスキャニング技術、独自の自律アルゴリズムにより、オートパイロット・モードでもパイロット制御と同等の自律計測を実施できる。
エクシン・ネクシスは、SLAMベースの空間マッピングで毎秒最大200万の点群を計測。また、エクシン・ネクシスは毎秒最大±2cmの精度、エクシン・ネクシス・プロは毎秒最大±5mmの精度で移動しながら計測が可能だ。
計測方法に柔軟に対応するエコシステム
計測データのリアルタイム表示と色付け機能によりキャプチャしたデータを現場でリアルタイムにカラー化。スキャンエリアが正確かどうか、キャプチャデータをその場で確認できる。独自開発のソフトウェア「エクシン・ビュー」によりキャプチャと後処理を同じシステムで制御するため、オンプレミスの処理作業にシームレスに連携して効率的なワークフローを実現する。
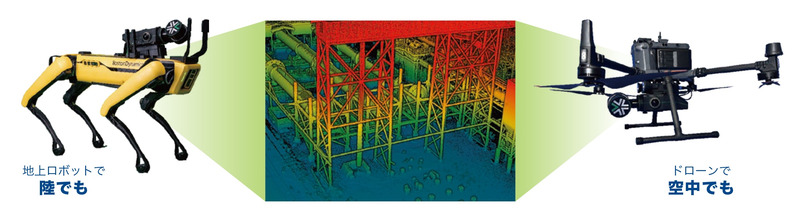
業務用ドローンに装着したオートパイロット・マッピングや、パイロット制御のマッピングも可能。また、地上ロボットともシームレスに統合。同システムが対応するロボットに搭載してマッピング作業を行うにあたり、ユーザーが操縦するパイロット制御のマッピング、半自律でのマッピング、自律走行でのオートパイロット・マッピングを選択することができる。軽量で頑丈な筐体は人間工学に基づいて設計されており、ハンドヘルドでの持ち運びにも適している。ハンドルは八角形のグリップデザインを採用し、長時間のスキャンでも手が疲れない設計になっている。


オプションの防水型バックパックは収納ケースにもなり、内部にはエクシン・ネクシス本体、バッテリーマウント、Vマウントバッテリー、タブレットと充電チャージャーを収納できる。
さまざまな車両に取り付けが可能。車両マウントオプションは、120ポンド(約54kg)の真空吸盤システムとマグネット式車両マウントを利用でき、過酷な計測環境でも安定した計測を実現する。


アクセサリー
【GPSモジュール】
エクシン・ネクシスにドングルを装着、GPSデータを後処理アルゴリズムで補正することにより、長時間のスキャンにおけるドリフトを除去する。

【保護ケージ】
スキャン品質や精度に影響を与えずに、エクシン・ネクシス本体を360度保護。

【地上ロボットマウント】
ロボットとペイロードを安定して固定するためのハードウェア・インターフェース。

【ドローンリンク】
ドローンにエクシン・ネクシス本体を取り付けるための治具。自律飛行を行うには、オプションのオートパイロットライセンスが必要となる。

【バックパック】
頑丈で防水性を備えたバックパック。現場での計測時や出張時の収納ケースとして使用可能。内部にはエクシン・ネクシス本体、バッテリーマウント、Vマウントバッテリー、タブレットと充電チャージャーを収納できる。

▼マルチプラットフォーム対応LiDARセンサー「Exyn Nexys / Nexys Pro」
https://www.nikon-trimble.co.jp/products/product_detail.html?tid=451