2023年3月23日、KDDIとアイサンテクノロジーは、2023年3月21日に長野県塩尻市の中山間地域で、自動運転車からドローンが離着陸し、ラストワンマイルの物流を行う実証に成功したことを発表した。ドローンが移動した自動運転車の位置に合わせて離着陸することに成功したのは日本で初めてだという(2023年3月23日時点、KDDI調べ)。
実証は、荷物を載せたドローンが自動運転車上から飛び立ち、中山間地域を飛行したのち自動運転車上へ帰還するシナリオで実施。実証にあたり高精度位置測位を活用し、KDDIスマートドローン、KDDI総合研究所、ティアフォーの協力のもと行った。
両社は今後、労働力不足が顕在化する2030年頃を目途に、都市部からの大規模な配送は自動運転車、陸上からの輸送が困難な経路ではドローンで配送するといった未来の荷物配送サービスの社会実装を目指すとしている。
なお同実証は、情報通信研究機構(NICT)から受託した「スマートモビリティプラットフォームの実現に向けたドローン・自動運転車の協調制御プラットフォームの研究開発」の一環として行ったものとなる。

急速な人口減少に伴う労働力不足が課題となっている中、特に中山間地域では公共交通機関の縮小や小売業者の減少など、日常生活を営む上で必要となる買い物が困難になる人の増加が予想されている。こうした課題を解決する手段として、自動運転車やドローンなどのスマートモビリティの活用による自動配送の仕組みを構築することが重要となっている。
実証概要
今回の実証では、自動運転車の走行とドローンの運航を統合管理する「協調制御プラットフォーム」や高精度位置測位を活用し、中山間地域に対して自動運転車とドローンを組み合わせて自動荷物配送を行うユースケースを想定している。
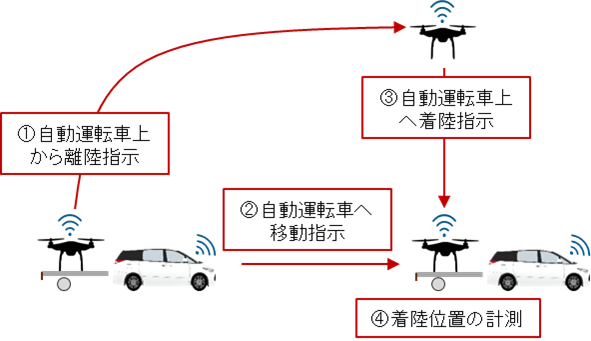
1. 協調制御によるドローンの着陸位置の制御
配送の効率化のため、自動運転車がドローンを飛び立たせた場所から移動しなければならないケースや、ドローンが飛び立った自動運転車とは異なる車両に帰還するケースなどが想定される。実証では、同プラットフォームを用いた協調制御により自動運転車の位置情報を参照しながらドローンを逐次制御することで、ドローンが正確に自動運転車上に着陸できることを確認した。
2. 衛星通信を活用したドローン飛行
ドローンにはセルラー通信と衛星通信の両方が利用可能な通信モジュールを搭載。セルラー通信が利用できないエリアでは衛星通信に切り替えることで、同プラットフォームとの接続性を保ったまま自動飛行が行えることを確認した。

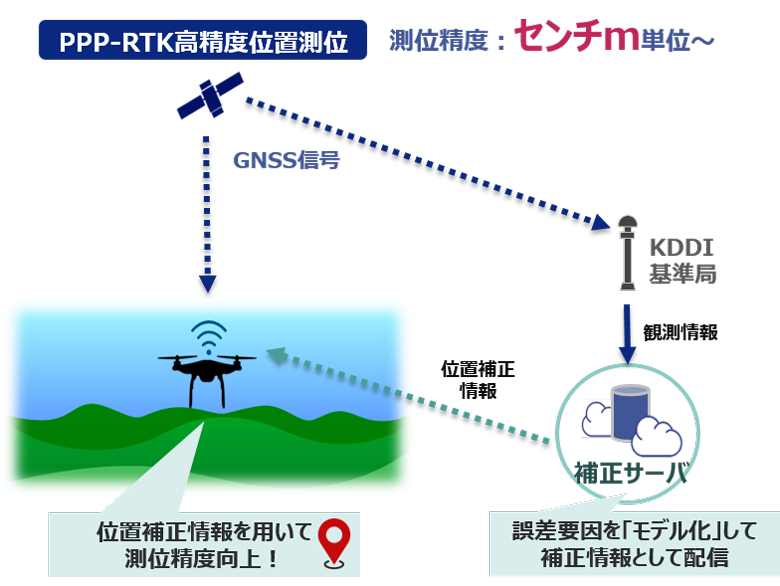
3. 高精度位置測位を活用した目視外飛行および着陸指示
ドローンにはKDDIが提供するPPP-RTK方式の高精度位置測位サービスを活用した。PPP-RTK方式は、PPP方式のカバー範囲の広さとRTK方式の測位精度の高さを併せ持ち、モビリティ性を高めた新しい高精度位置測位の方式である。同方式を活用することで、平均してセンチメートル単位でドローンの位置を把握することが可能となり、自動運転車への着陸を実現した。
今後、自動運転車とドローンを活用した自動荷物配送サービスの社会実装に向けて、荷物配送計画から配送・帰還までをすべて自動で行えるよう同プラットフォームの機能を拡張していくとしている。
拡張予定の機能
・ 複数台の自動運転車とドローンの協調制御を行う機能
・ 自動運転車やドローンが取得したカメラ映像や点群データを集約し、高精度な三次元地図の生成・更新を行う三次元地図基盤
・ 三次元地図基盤を活用したドローン飛行経路の自動生成機能
| 各社の実施内容 | |
|---|---|
| KDDI | ・研究開発の全体統括および統合実証主管 ・ドローンと自動運転車の協調制御プラットフォームの開発 ・PPP-RTK方式の高精度位置測位サービスの提供 |
| アイサンテクノロジー | ・高精度3次元地図の製作 ・ドローンと自動運転車の協調制御のための位置座標補正システムの開発 ・自動運転車運行のための行政や関係者との調整、協議、許認可手続き |
| KDDIスマートドローン | ・ドローン飛行のための行政や関係者との調整・協議・許認可手続き ・ドローン飛行システムの技術開発・提供 |
| KDDI総合研究所 | ・衛星回線とセルラー回線のシームレスな切り替え手段の開発 |
| ティアフォー | ・自動運転システムの技術開発・提供 |
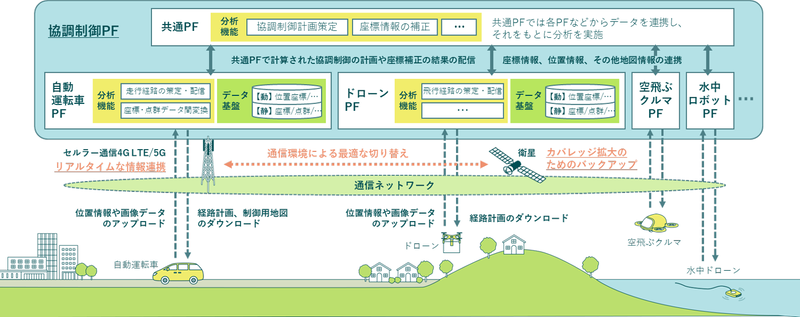
協調制御プラットフォームの特長
異なるモビリティの座標系を統一する機能と、位置情報を一元管理して各モビリティに適切な機体制御指示を行う協調制御機能を実現したプラットフォーム。これにより、自動運転車上にドローンを着陸させるなど、高精度の機体制御を求められる協調制御が可能になる。
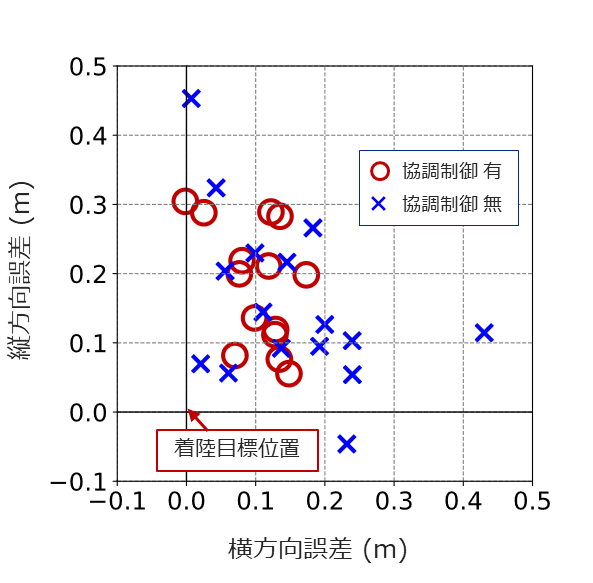
実証に先立ち、同プラットフォームの協調制御により自動運転車上にドローンを着陸させ、着陸精度を評価する試験を、九州工業大学の戸畑キャンパス内に構築されたNICT高信頼・高可塑Beyond 5G/IoTテストベッドにて実施した。
評価試験では、協調制御を用いずに自動運転車とドローンがあらかじめ決められた地点へ自動運行してドローンが自動運転車上へ着陸する場合と、プラットフォームの協調制御によりドローンを自動運転車上へ着陸させる場合とを比較し、着陸精度の評価を行った。
この評価実験により協調制御を用いない場合に比べて、着陸誤差が約3割低減したことを確認した。