2022年9月1日、Spiralは、清⽔建設の建築現場において、⾃社特許技術である⾮SLAM型屋内⾃律⾶⾏システム「MarkFlexAir」を活⽤したドローン⾃律⾶⾏、およびドローンによる現場動画の撮影と解析の実証実験を実施したことを発表した。

同実証により、ビルの屋内建設現場におけるマーカー方式でのドローン自律飛行の実現のほか、現場作業者によるMarkFlexAirの飛行経路(フライトプラン)設定作業やマーカー設置および飛行開始指示の操作が可能か、自律飛行したドローンが動画を撮影してくること、撮影した動画から現場資材等が検出できることなどを確認する。
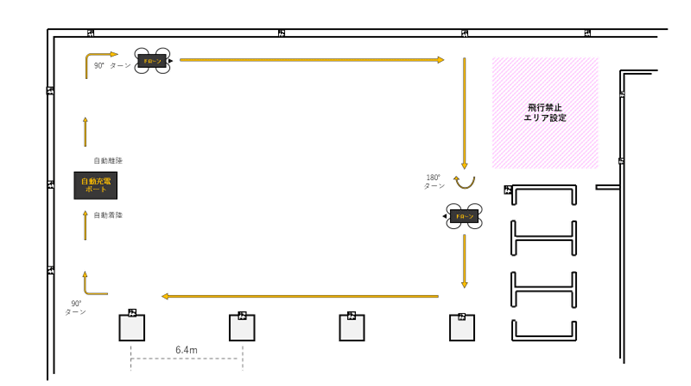
実証実験では、飛行禁止エリアや狭小空間での飛行制御を含めた3種類のフライトプランに対する自律飛行を行い、飛行に問題がないことを確認した。現場工事長が自律飛行経路を設定したほか、ドローンが撮影した動画を自律飛行管理Webアプリケーション(MFAトラッカー)で確認し、撮影した動画から複数の立馬やパイロンを検出できた。
実証実験のプロセス
1. 自動充電ポートからドローンが離陸、貼ってあるマーカーを読み設定されたルートを正しく一周して充電ポートに戻り自動充電、画像と動画を転送。
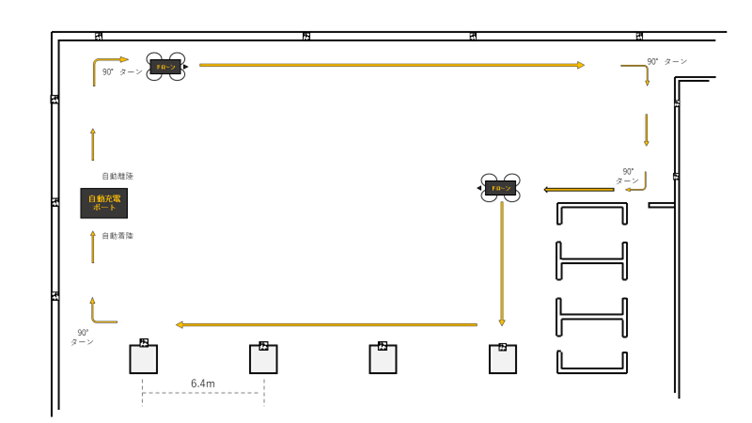
2. 1の飛行後、MFAトラッカーから飛行経路の設定を変更し、マーカーを追加。自動充電ポートからドローンが離陸し、マーカーを読み変更されたルートを正しく一周し、充電ポートに戻り自動充電、画像と動画を転送。
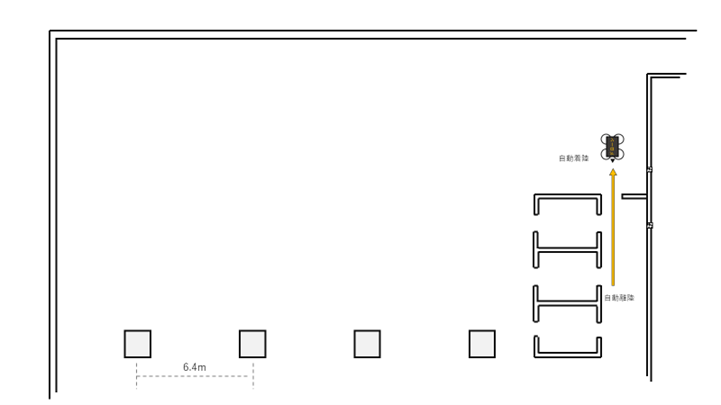
3. ドローンが離陸し、幅2mの通路を飛行後、ドア開口部90cmの狭小空間を通過。
4. 1および2の自動充電開始後に、ドローン撮影動画をMFAトラッカーで確認。

5. 1および2の自律飛行で取得した動画をAIで解析し、現場資材(パイロン、立馬)を検出。

同社は今後も⾶⾏精度の向上を継続的な⽬標とし、適⽤できる現場の幅を広げることやユーザーアプリケーションの使いやすさを改善することも含め、実際に現場で簡単に活⽤できるシステムの開発を進めていくとしている。