2022年1月20日、ダイナミックマップ基盤は、ドローンの正確な飛行を可能とする高精度な空域マップをエアモビリティ社に提供したことを発表した。
今回はエアモビリティ社が、三重県「クリ“ミエ”イティブ実証サポート事業」において採択された「「空飛ぶクルマ」のナビゲーションシステム「AirNavi」のドローンを使用した実証実験」を三重県鳥羽市で実施し、準天頂衛星システムの位置補正情報を用いた高精度測位情報と組み合わせた正確な飛行を実現した。
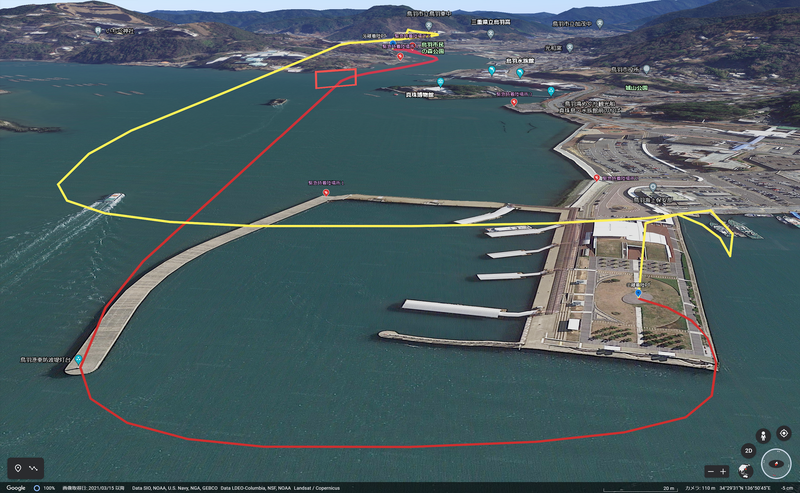
ドローン飛行経路 :鳥羽マリンターミナル↔︎福祉センター・大明東町駐車場
・黄線:飛行経路(赤線をもとに高度を与えたもの)
・赤線:陸上および海上における経路線
ドローンや空飛ぶクルマなどの無人航空機がレベル4飛行(有人地帯での目視外飛行)を実現するには、正確な位置での離着陸や、ビル・障害物を回避するために、機体が周辺環境を認識して自己位置を正確に特定することが課題となる。同様の課題を持つ自動走行車両においても、高精度3次元地図(HDマップ)は正確な自己位置把握に必要なデータとして扱われており、ドローンの自動航行にも同様のマップデータが必要になると考えられる。
同社は、自動車用途のHDマップの仕様策定・整備・更新によるノウハウをドローンなどの安全な飛行システム開発に役立てるため、無人航空機向けの空域マップの提供を進めるとしている。
「AirNavi」実証実験の様子(エアモビリティ YouTubeチャンネル)