2021年12月14日、エアモビリティ社は、同社が開発する空飛ぶクルマのナビゲーションシステム「AirNavi」のプロトタイプをドローンに搭載した実証実験を行った。
同実証実験は三重県が主催する「クリ“ミエ”イティブ実証サポート事業」に採択されて実施するもので、同事業では三重県から全国に先駆けて感染防止対策や新しい生活様式のモデルが構築されることを目指し、開発サポートや実証実験・社会実装の支援等を行っている。
同社は2020年11⽉に東京海上日動火災保険、三重県との間で「三重県内における「空⾶ぶクルマ」の実証実験、実⽤化に向けて連携する包括協定」を締結しており、今回はその取り組みの一環として、エアモビリティ社が開発した空のナビゲーションシステムの実証実験を、空飛ぶクルマに先立ちドローンを使用して実施した。

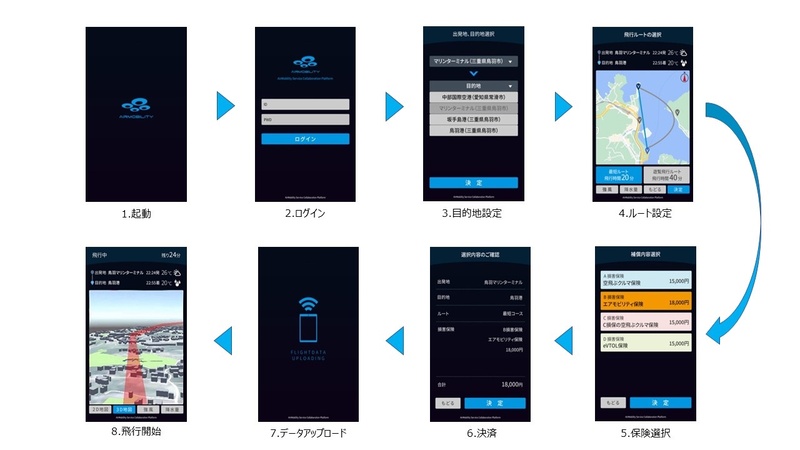
AirNaviは、利用者が目的地を入力し、気象データや空飛ぶクルマのバーティポート(離着陸場)情報など、諸条件を考慮して最適な飛行ルートを算出する。今回の実証実験では、そのルートデータをドローンのコントローラーにアップロードすることで、ドローンが自動で安全に目的地まで到着することを検証した。
同実証は、三重県鳥羽市において実施。AirNaviアプリを使って空のルートを設定し、海上から上空60m、約2.7km先の目的地までドローンを飛行させた。飛行中はリアルタイム気象情報の表示、ナビゲーション機能や離着陸の動作判定、通信などが問題なく作動するかなどを検証した。機体は、AirNaviアプリ用のタブレットや通信機器などを搭載し、物資輸送BOXを連結したイームズロボティクス「UAV-E6106MP」を使用した。


同社は今後、リアルタイムでの気象情報の変化によるルート変更、衝突回避や運航管理システムとの連携など、空飛ぶクルマでの実用化に向けた改良を重ね、2022年以降には無人飛行や有人飛行を実現し、2025年の大阪・関西万博において観客輸送サービスでの活用を目指すとしている。