2021年11月29日、センシンロボティクスとACSLは、センシンロボティクスの業務自動化統合プラットフォーム「SENSYN CORE」とACSLのドローン「Mini」を活用し共同開発した屋内自律飛行システムを利用して、実際のBIMデータを用いて建設現場における有用性検証を行ったことを発表した。

同実証実験は竹中工務店、カナモト、アクティオと共同で実施。建設ロボットプラットフォーム連携を見据えて、SENSYN COREで飛行経路策定と自動飛行を行った。竹中工務店 岡山事業所のフロア1階から2階への自動飛行では、2メートルの幅を通過し、障害物のある狭い状況でも安全に飛行することができた。ガラス面や外光の影響など実際の運用環境に近い試験でもVisual SLAM(自己位置推定技術)の性能を担保した。
今回の実証試験を踏まえ、現場での利用を想定した機能面での課題等について共同開発を行い、建設業界での商用化を進めるとしている。
建設現場における屋内ドローンの屋内飛行の自動化を実現することで、施工管理担当者の安全巡回や現地確認を事務所内の自席や遠隔地から行うことが容易になり、作業所への移動時間、現地滞在時間を削減。加えて、屋内撮影写真を各種打合せにも有効活用できる。

通常、屋外で飛行する際にドローンはGPS信号を受信している。非GPS環境の屋内でドローンを自律飛行させるには、SLAM(自己位置推定と地図生成技術)が必要となる。一般的にはカメラを用いて特徴となる点を認識することで飛行用地図を作成し、自己位置を推定しながら飛行を行う。しかし、作業とともに環境が変化する建設現場では、目印のタイムリーな設置が困難なことや、飛行ルートが図面で可視化できないため、操作者が手動操作していた。
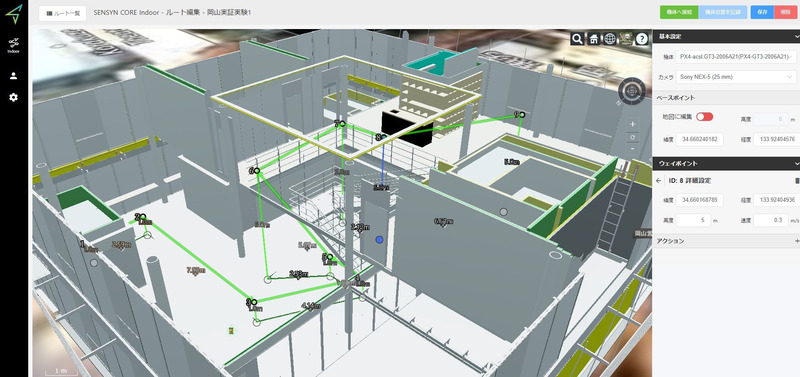
センシンロボティクスとACSLが開発した屋内点検ソリューションは、機体の飛行指示にBIMや3Dモデルから作成したマップを活用する。BIMデータを変換、3Dマップ表示することで、高さも含めて視覚的にわかりやすいルート設定が可能となる。また、手動操作による事前地図生成を行わず、BIMのみで飛行経路を策定し自動飛行を行う取り組みも進めているという。
機体はACSL独自の画像処理技術を使用したVisual SLAMにより、室内や工場内など狭く、GPS・GNSSデータが取得できない環境下における自律飛行が可能。また、ジンバルに搭載した2,000万画素のカメラにより高精細な画像を取得する。