2020年12月9日、理経、自律制御システム研究所(以下ACSL)およびVFRは、自動車の自動運転の検証にも用いられているVR(バーチャルリアリティ)画像の生成技術を応用し、ドローン活用現場をリアルに構築したエミュレータ(※1)を共同で開発することを発表した。
※1 開発のための検証を実機の代わりにソフトウェアを用いて行う仕組み。
共同開発の経緯と目的
ACSLは、2020年8月発表の中期経営方針「ACSL Accelerate FY20」において、非GPS環境下である煙突や閉所環境(下水道等)で使用する用途特化型の量産機体の開発を戦略の1つとして掲げている。非GPS環境下では、同社の自律飛行技術であるVisual SLAM(※2)を搭載したドローンが用いられることにより点検が可能となっており、今後も更なる技術開発を進める必要がある。
VFRは、ドローン事業者、エンドユーザー向けのサービス提供者、エンドユーザー向けにソリューションの提供を行っており、ACSLの用途特化型機体を共同で開発している。
産業用ドローンの開発においては、実際の現場で実証実験を重ねることで、現場での課題解決に活かすことのできるドローンをカスタマイズして作り上げていく。しかし、実証実験のためには、現場における通常の運用を止める必要があるため、実施までに時間を要することが課題として挙げられる。また、ドローン開発を効率的に行うためにエミュレータを用いるものの、従来のエミュレータはVisual SLAM飛行に用いられる様々なカメラには対応していないことから、必要な検証ができないという課題があった。
理経は、ITおよびエレクトロニクス業界のソリューションベンダーであり、建物や路面などの環境モデルと、車両シミュレータによる車両モデルを統合しVR上に再現する技術を開発している。現実と同等のVR空間を再現することが可能で、自動運転の検証にも用いられている。
今回、理経のVR画像を生成する技術と、ACSLとVFRが持つドローン開発技術と実証実験の経験から、ドローン開発のための新たなエミュレータを開発することができると考え、共同開発に取り組むこととなった。
※2 Visual SLAM(Simultaneous Localization and Mapping):画像処理を使用した自己位置推定を行う技術。
開発概要
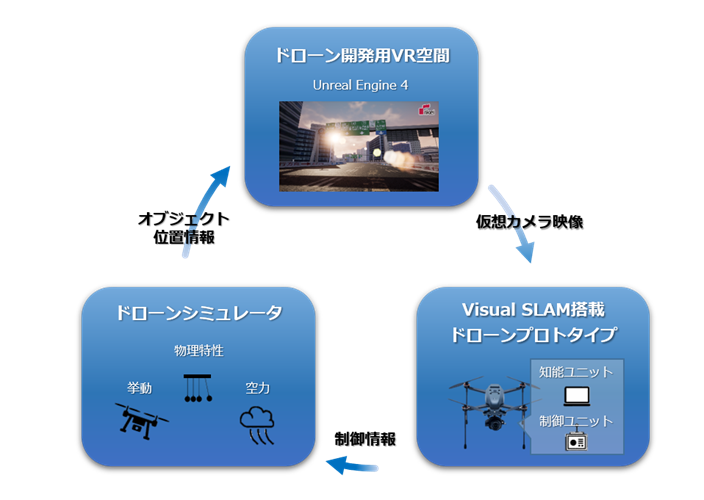
・ 一部に実コントローラを使用したHILS(※3)構成を前提として、CGで製作したVR空間を用いたエミュレータ開発を行う。
・ VR空間上に実際と同様の建物、天候、ドローンモデル等を再現し、ドローンのフライトコントローラの制御信号に基づき、リアルタイムにドローンの挙動を計算・映像に反映する形でシミュレーションを行う。
・ ドローンに搭載されたカメラ特性を踏まえた仮想カメラをVR空間内に配置し、リアルタイムに映像を生成することで、実映像と同等のCG映像をエミュレータに用いることが可能である。これによりVisual SLAM開発に必要な膨大な映像データを短時間で生成することができる。
※3 HILS(Hardware-in-the-loopSimulation):構成の一部にハードウェアを用い、複数のシミュレーションシステムを連携し開発する手法。
今後の展開
理経、ACSLおよびVFRは、ドローン活用現場をリアルに構築し、ステレオカメラ、赤外線カメラ、レーザー光を利用するLiDARセンサーなど、点検用ドローンに使用されるカメラに対応したエミュレータを共同で開発することで、ドローン開発の効率化を図っていく。また、ドローン開発にエミュレータを用いることで、煙突点検ドローンや閉鎖環境点検ドローン等の用途特化型機体の実証実験を重ねていき、カスタマーエクスペリエンスの向上を目指していく、としている。