2020年11月30日、弘栄ドリームワークスは、立命館大学理工学部ロボティクス学科 生物知能機械学研究室が開発した連結車輪型配管内検査ロボット「AIRo」を実用化し、パイプ探査ロボット「配管くん」として、2020年10月14日より本格的にサービスを開始したことを発表した。
開発の背景
現在、建設業界は、少子高齢化に伴う経済規模の縮小や労働人口の高齢化による建設技能労働者の不足などの課題に直面している。また、ビル・工場などの産業施設、病院や学校などの公共施設、マンション・住宅などの住居施設といった新築工事は、地方の人口減少により縮小傾向にある。
こうしたなか、弘栄ドリームワークスは、リニューアル工事において設備診断を行うための、配管内部を検査できるロボットの開発を進めてきた。その際、同社のニーズに最も適していた技術が、立命館大学理工学部ロボティクス学科 生物知能機械学研究室が開発した連結車輪型配管内検査ロボットAIRoだったという。同社は、2018年より研究室の技術協力を受け、2020年11月に拠点である山形県内の学校や公共施設での試験導入を進め、今回、パイプ探査ロボットの実用化にいたった。
パイプ探査ロボット「配管くん」
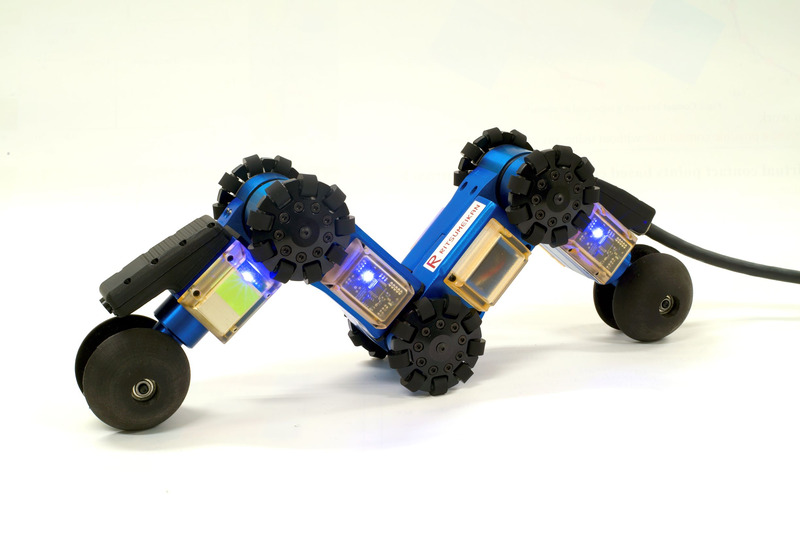
連結車輪型配管内検査ロボットAIRoの技術をベースに、前後にCMOSカメラとLED、またジャイロセンサーと角速度計を搭載している。
直径100~150mmの配管内を自由に移動しながら内部の映像を撮影し、配管の状況を確認。配管の位置も計測し、配管の診断と図面作成を実現する。

今後の展開
パイプには20~300mmまで、さまざまなサイズ・形状・材質のものが存在し、それぞれに合ったパイプ探査ロボットのニーズがある。配管くんを皮切りに、今後はロボットのバリエーションを増やし、ユーザのニーズに対応できるよう準備を進めるという。
また、工場・プラントや社会インフラなど、特殊用途のロボットのニーズも多々あり、市場動向を踏まえさらに開発を進めていくとしている。
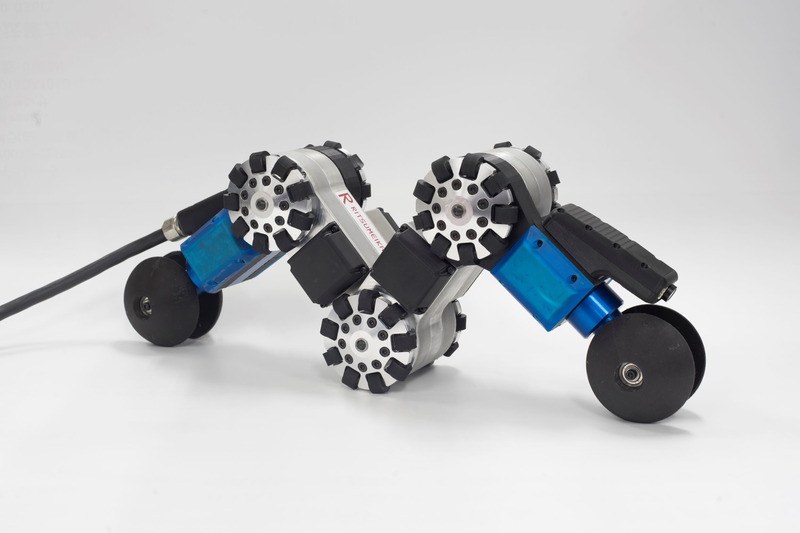
連結車輪型配管内検査ロボット「AIRo」
立命館大学理工学部ロボティクス学科内にある生物知能機械学研究室の馬書根教授、加古川篤講師が開発した「AIRo」は、複数のジグザグ型リンクを備えたロボットで、関節に備わったバネにより車輪を配管内壁に押し付けることで、水平だけでなく垂直の配管内も走行可能な自走式ロボットである。3インチ(約75mm)~4インチ(約100mm)までの内径に対応。車軸とリンク間の関節軸を同一直線状に配置させることにより、曲管走破性を損なわずに小型化を実現している。また、先端と後端に備わった球状車輪によって、ロボットの姿勢を配管軸回りに転がすこともできる。これにより、三次元的に複雑に曲がりくねった配管に対しても素早く確実に適応できるだけでなく、手元の操作が直感的でわかりやすくなっている。現在は、トルクセンサ付きアクチュエータユニットを中央関節に備えた新たなロボットを開発し、垂直T字管走破にも成功している。
▼配管内検査ロボット(生物知能機械学研究室)
http://www.malab.se.ritsumei.ac.jp/top/robot/inpipe.php