2020年2月4日、東京地下鉄( 東京メトロ)は、ベイシスコンサルティング及び東京大学大学院情報学環ユビキタス情報社会基盤研究センターの協力のもと、非GPS環境下でのトンネル検査におけるドローンの運用を2020年2月6日(木)から半蔵門線で開始することを発表した。
また、本郷飛行機と共同で、自律飛行型ドローンの開発に着手する。
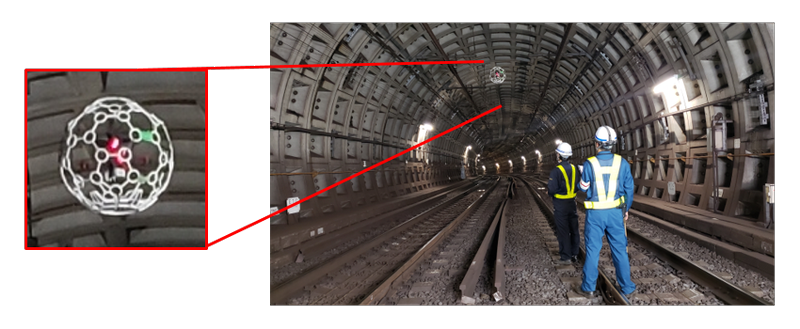
トンネル検査におけるドローンの運用については、従来、トンネル内において構造物の状態を確認する検査を目視にて行っていたが、今後その検査の一部にドローンを活用していく。これにより、高い場所の構造物を従来の目視より効果的に確認できるほか、ドローンによる検査データの蓄積等により質の高いトンネル検査が可能となる。なお、今回ドローンを活用する場所は、非GPS環境下かつ複雑な構造の地下鉄トンネル内であることから、自社でパイロットを育成し、共同製作したドローンを東京メトロ社員が自ら操縦する。
また、自律飛行型ドローンの開発については、画像認識技術やAI技術を活用し、GPS電波の届かない地下空間において、操縦者を必要としないドローンを飛行させることを目指す。これと並行して、鉄道施設の点検検査の更なる効率化や巡回警備等への適用について検討していく。将来的にはドローンを飛ばすだけでなく、そこで取得されたデータを処理し、業務に組み込むまでの研究開発にも取り組んでいくという。
東京メトロは、今後も新たな技術の開発・導入を通じて、安全性向上に向けた取組みを積極的に進めていく、としている。
ドローンを活用したトンネル検査
1. 実施期間
・2020年2月6日(木)から
2. 実施場所
・半蔵門線トンネル(①開口部、②立坑、③トンネル上部)

3. ドローン活用イメージ

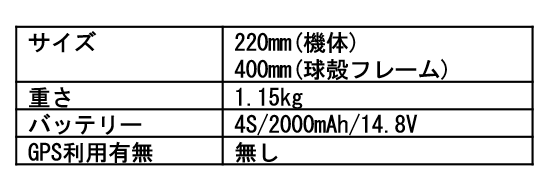
4. ドローン仕様

自律飛行型ドローン開発
1. 目的
非GPS環境下での自律飛行型ドローンの安全性・正確性の検証を行い、また各種点検検査や警備巡回等、多様な活用方法を検討し、業務の更なる効率化を目指す。
2. 本郷飛行機について
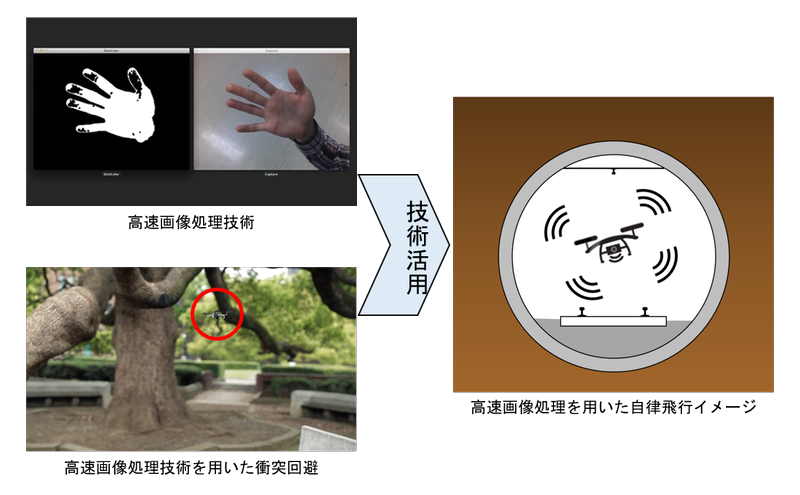
一般に販売されているドローンは屋外をラジコンで飛行するものが多い中、本郷飛行機が開発しているドローンは、高速画像処理技術による自律制御を用いた屋内/屋外飛行など、自動飛行の技術開発を中心に行っている。
機体の最適な部品設計から運用システムまで幅広い技術開発領域に精通しており、トータルソリューションとしての開発が可能である。
3. 技術概要
(1)高速画像処理技術
屋外ではGPSを活用することでドローンの現在位置を把握することが出来るが、地下空間ではGPS信号を受信することが出来ない。機体から撮影した画像を処理することにより、壁や地面の特徴を抽出・追跡し、ドローンの姿勢変化や移動距離を計算する。
(2)衝突回避技術
衝突を回避しながら飛行することは、様々な機器や設備が取り付けられた地下空間内の飛行には必要不可欠である。高速画像処理技術を用いることで、障害物の多い空間の状況を認識し、障害物との衝突を回避しながら、自ら飛行計画を設計することが出来る。
4. 開発工程
地下鉄環境における自律飛行の可能性を検証するため、空間認識技術及び飛行技術の研究開発を進め、地下鉄トンネル内の自律飛行を目指す。並行して、自律飛行型ドローンの活用シーンの検討を進め、活用シーンに対応した機体やセンサーの開発にも取り組み、各種業務への適用を目指す。