2019年11月13日、TISと会津大学は、 共同で「在庫管理システムと自律移動配送ロボットを連携させた搬送業務の自動化」を目指す実証実験を、会津大学内のLICTiA(先端ICTラボ)にて2019年11月26日~11月28日に実施することを発表した。
同実証実験は、TISと会津大学が共同研究を進める「自律移動する異機種ロボットに関する要素技術の研究」の研究成果を検証することを目的としている。
FIWARE(ファイウェア) ※1 を活用しTISが開発を進めている「ロボット間のデータ連携」などを実現するプラットフォーム「RoboticBase」と、会津大学で研究開発している自律移動ロボットを連携することで、搬送業務のラストワンマイルの自動化をユースケースとして実施する。
※1 FIWARE:FI(Future Internet)WARE(次世代インターネット基盤ソフトウェア)。FI-PPPが次世代インターネット技術における欧州の競争力強化と、社会・公共分野のスマートアプリケーション開発を支援するために開発した基盤ソフトウェア。参考URL:https://www.fiware.org/
実証実験の概要
今回の実証実験を通じて、TISでは「RoboticBase」と様々な業務システムの容易な連携と、異機種ロボットのインターフェースを共通化することで簡単な接続が可能になる仕組みの検証を行う。これにより将来的には、様々な業務システムとサービスロボットを活用した業務サービスの構築を目指す。
会津大学では、クラウドロボティックスの概念による情報システムとロボットとが一体となった新しい技術を確立することで、自律移動ロボットのより柔軟な経路設定など、サービスロボットの実用化への貢献を目指す。
TISと会津大学では、今回の実証実験を踏まえて、今後は社会課題解決を目指して福島県会津若松市や南相馬市などのフィールドで社会実装を目指した実証実験を計画している。
実施期間 :2019年11月26日(火)~11月29日(金)(29日は予備日)
実施場所 :会津大学内 LICTiA
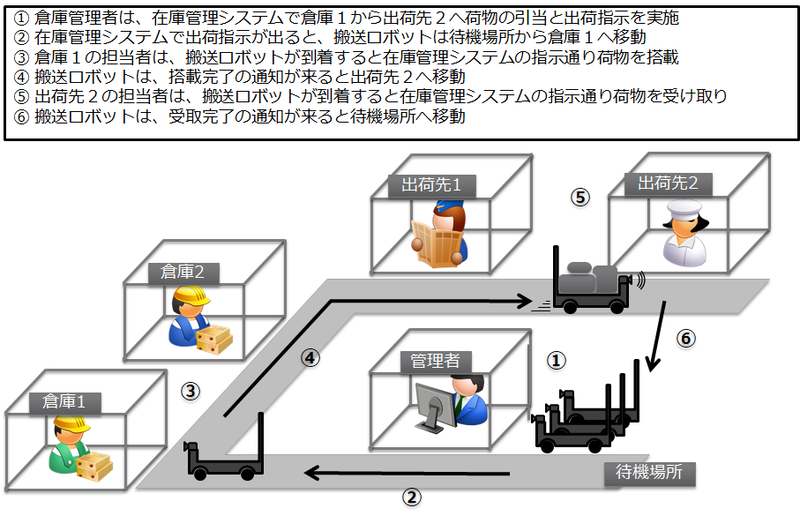
概要 :TIS開発の「RoboticBase」および在庫管理システム(EVEN ※2 や在庫管理サービス)と、 会津大学が研究用に開発している自律移動ロボットを使って、搬送業務のラストワンマイルの自動化をユースケースとした実証実験を行う。
実証実験の目的と検証ポイント
1.「RoboticBase」とERPシステムとの連携の容易性の確認
2. 自律移動ロボットの新しい経路計画方式の実現性の確認
3.「RoboticBase」と自律移動ロボット間のインターフェースにおけるデータモデルの確認
※2 EVEN:TIS長野が提供する在庫管理システム(https://www.tis-n.co.jp/it-solution/even/)
背景
労働力不足や高齢化問題といった社会課題の解決には、人の業務の一部を物理的に代行できるサービスロボットの活用が将来的に有益な手段の一つと考えられる。これまでの業務システムにおいては、人とシステムのインターフェースを中心に業務プロセスが設計されていた。
サービスロボットの活用においては、そのシステムの業務プロセスの中に人とサービスロボットの役割を明確にした設計をすることで、新たな業務サービスが実現できる。
TISでは、サービスロボットを業務システムに組み込む手段として「RoboticBase」の活用を想定し、今回のような実証実験を通じた開発を進めている。
今後の展開
TISでは、実証実験を通じて「RoboticBase」のロボットを統合管理する機能(ロボット統合稼働管理機能、ロボット統合業務管理機能、ロボットタスク管理機能、ロボット外部システム連携機能など)の充実を図っていく。搬送業務やビル管理業務などで、業務システムとサービスロボットを連携したサービス提供を目指していく。
また、ロボットや業務システムとの接続性を容易に実現するための標準化活動として、今回の実証実験で使用した「RoboticBase」と自律移動ロボットのインターフェースをデータモデルとして定義する。更に、FIWAREの普及を民間主導で推進する非営利団体であるFIWARE Foundation e.V.内のRobotics Tech Roadmap WG ※3 にて、データモデルの精査とFIWARE data modelsへの登録を目指した活動を計画している。
※3 Robotics Tech Roadmap WG:FIWARE Foundation e.V.のメンバーで、Robotics分野におけるテクノロジーRoadmapを検討するためのワーキンググループ(参加メンバーはTIS以外に、FIWARE Foundation、Fraunhofer IML、Atos、eProsima等)
「RoboticBase」について
TISの「RoboticBase」は、IoT・スマートシティ向け基盤ソフトウェア「FIWARE」を活用した、複数のサービスロボットの統合的管理と、業務システムとロボットやセンサーなどの相互連携を実現するためのプラットフォームである。「RoboticBase」には、研究開発用の「RoboticBase-Core」と顧客提供用の「RoboticBase」がある。
1.「RoboticBase-Core」
研究開発用に開発し、基本機能に特化したもので、今回の実証実験でも使用している。幅広い利用からのフィードバックを受けるためオープンソースとして公開している。公開先:https://github.com/RoboticBase
2.「RoboticBase」
「RoboticBase-Core」を基盤とした商用版のプラットフォームで、警備ロボット、清掃ロボット、搬送ロボットなど種類の違うロボットを統合管理するための機能や、人が作業する業務システムとの連携を行う。今後はドローンを活用する機能などもリリース予定。