2026年6月19日、Liberaware(以下、リベラウェア)とKDDIスマートドローン、大林組の3社は、相模ダムリニューアル工事において、現場補助者の配置や第三者の立入禁止措置が不要で目視外飛行ができるドローンのレベル3.5飛行による遠隔自動巡視と、点群データ生成の自動化に成功したと発表した。
この取り組みは、国土交通省の「中小企業イノベーション創出推進事業(SBIRフェーズ3基金事業)」で採択された「建設現場における施工管理の省力化・高度化技術の開発」の一環として実施したものとなる。


多くの人手と時間を要する建設現場の測量や巡視・点検ではドローンの活用が進んでいるが、従来の無人地帯の目視外飛行(レベル3飛行)では活用範囲が限られていた。また、取得した膨大な画像から3次元点群データを生成する作業に時間を要していた。
今回3社は、レベル3.5飛行を活用した巡視・点検と点群データ生成の自動化に取り組んだ。
レベル3.5飛行による広範囲な巡視・点検
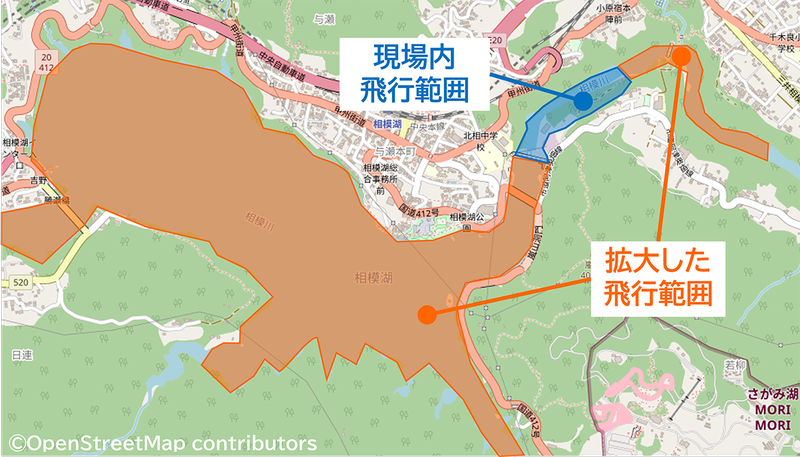
レベル3.5飛行を実現するため、第三者が立ち入る可能性のある場所では通過前に機体を一時停止させ、搭載カメラにより歩行者などの有無を確認した上で通過する運用を行った。ドローンの飛行範囲が拡大したことで、レベル3飛行では困難であった現場外からも施工状況の巡視・点検が可能となり、工事中の安全確保に寄与した。


「LAPIS」連携で高速自動解析
KDDIスマートドローンの自動充電ポート付きドローンと、リベラウェアの空間iPaaS基盤「LAPIS」(※1)を連携させることで、画像のデータ連携から点群データ生成までを一貫して自動化するパイプラインを構築した。ドローンで撮影した画像データは自動充電ポート付きドローンからLAPISに自動連携され、「LAPIS 3D CORE」により点群データを自動生成する。これにより、従来5時間を要していた点群データの生成処理を約1時間に短縮し、現場作業の省人化と進捗管理の効率化を実現した。さらに自動生成したデータと設計BIM/CIMを組み合わせることで、現場の進捗管理や安全管理に活用している。
※1 複数のクラウドサービスやオンプレミスシステムから得た建設工事や施設維持管理の空間データを統合し、リアルタイムでのデータ連携や業務自動化を実現するためのプラットフォーム。

自動充電ポート付きドローンと4G LTEによる安定した遠隔運航
自動充電ポート付きドローンと機体間のWi-Fi通信(2.4GHz)のバックアップとして、上空電波(4G LTE)を活用する構成を採用した。これにより、自動充電ポート付きドローンから距離がある現場外であっても通信断を防止し、安定した自動飛行を実現した。

リベラウェアとKDDIスマートドローンは、夜間や悪天候下での安定運用に加え、取得データの多様な活用方法の検討や、自動化技術の実装を推進する。大林組は実証で得た知見を活用し、品質管理や安全管理への応用、他の土木工事などへの展開を進める方針だ。
【各社役割】
| リベラウェア | ・事業主幹 ・3次元モデルの点群化 ・データ活用提案 |
| KDDIスマートドローン | ・自動充電ポート付きドローンの設置 ・ドローン飛行ルートの作成 ・ドローンのレベル3.5飛行を含む運用 |
| 大林組 | ・実証現場の提供、調整 ・現場ニーズ、データの活用方法の整理 ・設計BIM/CIMモデル作成・管理 |