2026年5月14日、NTT、エヌ・ティ・ティ エムイー(以下、NTT-ME)、NTT e-Drone Technology(以下、NTTイードローン)は、無線区間で発生する遅延揺らぎを低減する技術を開発し、約60km離れた拠点間で遠隔ドローン操縦環境を構築することに成功したと発表した。
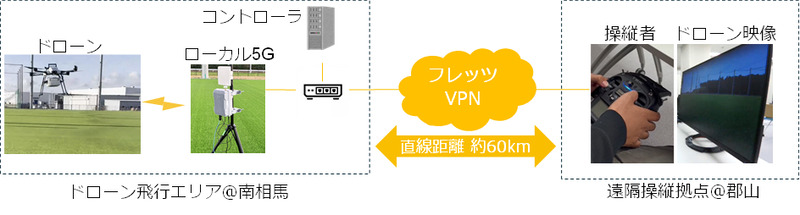
実証実験では、ローカル5GとフレッツVPNを介して操縦者へ安定した映像伝送を行い、遠隔からドローン操縦が可能であることを確認した。これにより、危険な場所での点検業務を現地派遣なしで行えるようになる。
インフラや設備の点検業務では人手確保が課題となっており、ドローンを用いた遠隔点検に対する期待が高まっている。建設現場や工場内点検といった点検箇所が日によって変わる場合や、比較的狭い空間でドローンを精密に遠隔操縦するには、通信が途切れず映像が乱れない安定的な映像伝送が不可欠だ。
無線区間では、上り・下り通信の周波数帯域の共有や、無線品質が低下した際の再送制御により揺らぎが発生する。パケットの遅延に揺らぎが発生すると映像乱れが生じ、操縦精度が低下するという課題があった。
この課題に対し、3社は無線区間で発生する遅延揺らぎを低減して映像品質を安定化する技術の実証に取り組んだ。
実証では、ドローン操縦者がネットワークを通じて伝送されたカメラ映像を見ながら、ドローンを遠隔操縦する環境を構築。福島県南相馬市のロボットテストフィールドのドローンを、直線距離で約60km離れた福島県郡山市から遠隔操縦できることを確認した。2拠点間はフレッツVPNで接続し、無線区間にはローカル5Gを用いた。
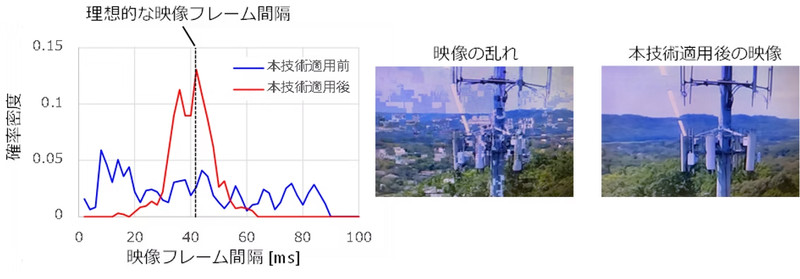
また、無線区間で発生する遅延揺らぎを補正する機能を実装。高負荷な映像伝送を行うと伝送時間全体の12%で映像乱れを検出したが、この技術を適用することで5%に低減した。また、映像乱れが大きいと、操縦を中断して目的地到達まで多くの時間を要するため、移動時間も評価。目視操作で平均35秒を要する移動を、遠隔操作でも操縦を中断することなく平均32秒と同程度の時間で移動を完了した。
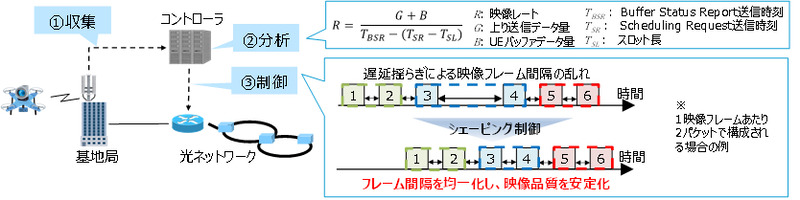
この技術では、無線基地局から収集したトラヒック情報をもとに映像レートをコントローラで分析し、映像レートに合わせてフレーム間隔を光ネットワーク装置で補正することで遅延揺らぎを低減する。無線基地局単体では無線区間の遅延揺らぎに対処することは困難だが、無線区間と光区間を含めた光無線連携制御により遅延揺らぎを低減し、映像品質の安定化を実現する。
【技術構成】
① 収集:無線基地局から随時収集することで映像レート変化に追従。
② 分析:トラヒック情報から正確な映像レートを算出。
③ 制御:映像レートに合わせたシェーピング制御によりフレーム間隔を補正。
映像フレーム間隔の分布が理想的な値に近いほど、映像品質は安定しているといえる。技術適用前は、無線区間で遅延揺らぎがあるため映像フレーム間隔のバラツキが大きく映像が乱れる。この技術を適用することで、遅延揺らぎを低減して映像フレーム間隔を理想的な値に近づけられるため、映像の乱れも解消される。
【各社役割】
| NTT | 映像品質安定化技術の実装と、遠隔操縦における本技術の有用性検証 |
| NTT-ME | 実証におけるローカル5Gの設計・構築・運用 |
| NTTイードローン | 実証におけるドローンおよび操縦環境の提供と、目視外操縦性の確認 |
今後、ドローンに限らず無人航空機やロボットの操縦などへの幅広い適用を目指し、同技術の実用化を推進していく。また、点検業務を始め遠隔オペレーション業務全般での活用を狙う。
なお、この技術は2026年5月27日、28日に開催される「つくばフォーラム2026」で展示される予定である。