2025年10月2日、コアは、石川県能登半島諸港で、災害時の被災構造物の状態確認を想定したみちびき(※1)CLAS(※2)対応ドローンを活用した検証を実施したと発表した。
この検証は、国土交通省 国土技術政策総合研究所の令和6(2024)年度発注業務(件名:リモートセンシング技術による定量的な変位把握と施設の利用可否判断に関する調査業務、受注者:パシフィックコンサルタンツ)の再委託先として実施したものとなる。
※1 みちびき:準天頂軌道の衛星が主体となって構成されている日本の衛星測位システム。
※2 CLAS:Centimeter Level Augmentation Service センチメーター級測位補強サービス。

2024年に発生した能登半島地震では、災害発生後、通信サービスの利用が困難な状況が続き、応急復旧までに約2週間、本格復旧(一部地域を除く)までに約3か月を要した。
被災地ではドローン測量による被災構造物の状態確認といった迅速な災害対応が求められる。平時ではインターネット通信などが必要なネットワークRTK(※3)を利用して高精度なドローン測量を行えるが、被災直後は通信インフラが使用できない可能性がある。
コアが開発したみちびきCLAS対応のGNSS受信機は、モバイル回線が届かない場所でも現在位置を誤差数cmで求めることができる。その受信機をドローンに搭載することで、通信インフラが回復していない状況でも高精度な飛行を実現する。
※3 ネットワークRTK:基準局と移動局(ドローン等)の両方でGNSS衛星からの信号を受信し、情報をやりとりして位置情報のずれを補正することで、精度の高い測位を実現する測位方式。
実施内容
災害直後の通信インフラが不安定な環境でのCLAS対応ドローンの有用性を検証した。
石川県能登半島の諸港を対象に、CLASを利用した2種類のドローン構成とネットワークRTKを利用した1種類のドローン構成を用いて、それらの撮影写真から生成した3D地形データの位置精度の比較を行い、CLASを利用したドローンがネットワークRTKを利用したドローンに対して、どの程度の点群位置精度を有しているか検証した。
| 構成 | CLAS搭載型ドローン |
| 使用機材 | ChronoSky PF2 |
| 概要 | CLAS対応GNSS 受信機を内蔵した国産ドローン。災害時などの通信インフラが使用できない環境でもドローン単独で高精度な自律飛行が可能。インターネットが不要なため、災害時にネットワークRTK利用ドローンのリカバリー策として期待される。 |
| 構成 | CLAS対応型ドローン |
| 使用機材 | ・ChronoSky Base ・汎用RTKドローン |
| 概要 | 汎用的なRTKドローンとコアが開発したCLAS基準局ChronoSky Baseを組み合わせることで、CLAS対応GNSS受信機の内蔵が難しいドローンでもインターネット不要で高精度な自律飛行が可能になる。 |
| 構成 | ネットワークRTK利用ドローン |
| 使用機材 | ・ネットワークRTKサービス ・汎用RTKドローン |
| 概要 | ドローンがインターネットを介して自己位置を補正することで、高精度な飛行が可能。ネットワークRTKの利用にはインターネットが必須となる。 |
検証の結果、みちびきを利用することで、衛星単独で高精細な3Dデータを作成できることを確認した。
災害直後はネットワークが不安定になることが予測されることから、被災地施設を迅速に調査するリモートセンシング技術の一つとして、ネットワーク不要で高精度な地形測量が可能なCLAS対応ドローンが活用できる。


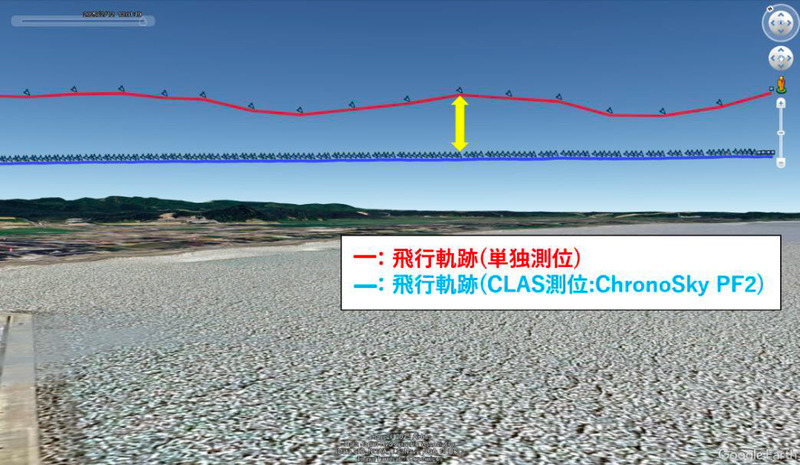
また、CLAS搭載型ドローンChronoSky PF2の飛行結果と単独測位結果を比較したところ、単独測位では高さ方向にランダムな誤差が生じて不安定な軌跡となっているのに対し、ChronoSky PF2の飛行は安定していた。ドローンの位置はGNSSによる測位精度に加えてドローンの機体制御精度が影響するため、今後は機体制御精度の向上を図る方針だ。