
国立研究開発法人新エネルギー・産業技術総合開発機構(以下NEDO)は、2018年2月5日(月)、三菱重工業株式会社とともに、トンネル災害やプラント災害で活用が期待できる遠隔操縦型陸上移動ロボットの性能評価基準策定に向けた試験を実施した。さらに、災害発生時と日常的な点検時の双方に適用可能なロボットの走破性能を評価する試験方法もあわせて検証した。
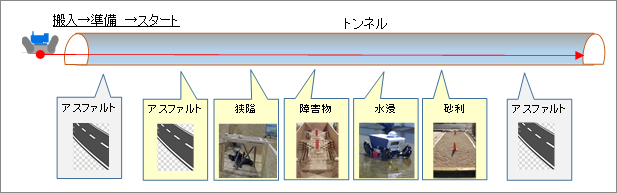
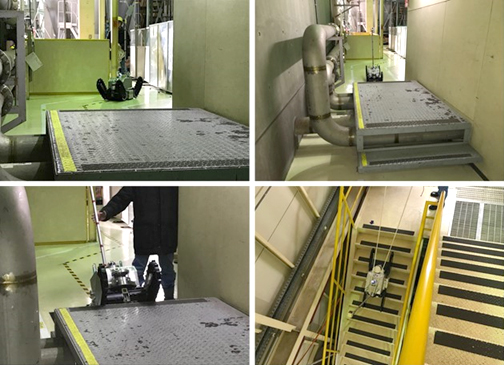
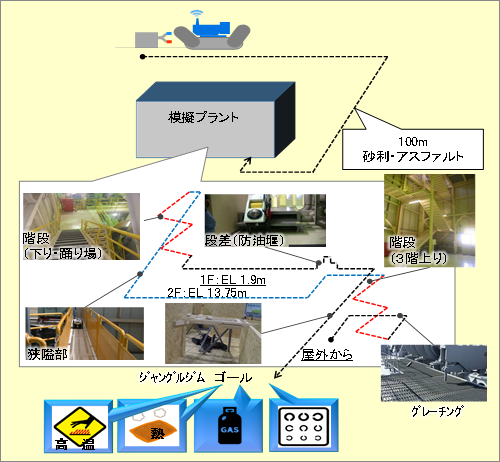
本試験では、トンネル災害やプラント災害が発生した現場を想定し、三菱重工業(株)内に水溜りや障害物、暗闇、ガス発生源などの特殊環境を模擬的に再現して行われた。「陸上移動ロボットの走行距離や時間」、「搭載された各種センサの収集情報」など性能評価基準策定に向けた試験方法の妥当性を検証し、性能評価策定に必要な各種データを取得した。

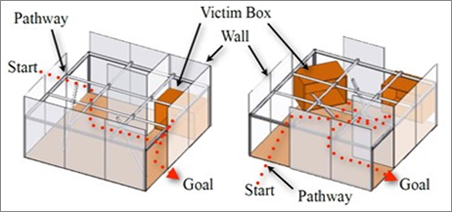
これに加えて、プラントでの日常的な点検時でも活用可能なロボットの走破性を評価する試験方法も検証した。国立大学法人長岡技術科学大学構内に、三次元狭部障害ジャングルジムなどを構築して現場を模擬的に再現。日常点検での活用に向けた性能評価の基礎データを収集した。


このような試験が行われた背景には、近年、世界中で大規模災害やインフラの老朽化、産業施設の事故などが多発しているという現状がある。このような現状の中で、災害・事故時はもちろん、平時でも使用でき、迅速な事態収拾を可能とする特殊環境用ロボット(防災・減災、災害対応、インフラメンテナンスロボットなど)の配備が急務となっているのだ。
これらの課題解決に向けたロボットの技術開発は国内でも活発に実施されている。しかし問題なのは、特殊環境用ロボットの性能を測るモノサシが明らかになっていないことだ。そのため、技術開発の促進および普及のために、性能を測る試験方法を含めた性能評価基準などの策定が喫緊の課題となっているのである。
NEDOは、このような現象の課題を解決するために、「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト」において、性能項目や性能評価のための試験方法、および試験に使用する計測システムなどをまとめた日本初の性能評価基準の開発に取り組んでいる。物流やインフラ点検および災害対応分野などでの活用が期待される各種ロボット(無人航空機、陸上ロボット、水中ロボットなど)の性能を実現場に導入する前に評価するためだ。その一環として、今回の試験が行われた。
NEDOは、今後も性能評価基準の策定に貢献すべく準備を進めていくとともに、陸上移動ロボットを含むロボット関連市場の創出にも寄与する。ロボット関連市場では、2030年に7,000億円規模と期待されている社会インフラの維持管理・更新が期待されている。
また、2017年11月22日にNEDOと福島県が締結した「福島ロボットテストフィールドを活用したロボット・ドローンの実証等に関する協力協定」の取り組みの一環として、性能評価基準に基づく試験が「福島ロボットテストフィールド」の試験用トンネルや試験用プラントで実施できるよう、本試験から得られた知見を福島県へ提供する。一部福島ロボットテストフィールドの設計に反映される予定だ。