2026年5月8日、コマツは、宇宙航空研究開発機構(JAXA)が進める共同研究制度「Moon to Mars Innovation」の第13回研究提案募集において、「次世代月面ロジスティクスに資する積載能力強化型物流ローバの研究開発」など3件の提案を行い、共同研究先として採択された。
コマツは本体の質量を超えるペイロードの積載が可能な物流ローバーの走行装置の研究開発を開始するとともに、レゴリス(月面を覆う微細な砂)を自動掘削する建機の実現に向けた要素技術の研究開発を行う。
同社は2021年に国土交通省と文部科学省が進める「宇宙無人建設革新技術開発」の選定を受けて以来、建設・鉱山機械の知見を生かし、自動掘削制御、測量・地盤調査など月面建設機械の研究開発に取り組んできた。今回の共同研究で得られる知見も活用し、今後も月面でのインフラ構築や資源採掘に向けた建設機械・無人建設技術の研究開発を推進する。
コマツの研究開発テーマ概要
次世代月面ロジスティクスに資する積載能力強化型物流ローバの研究開発(3年間)
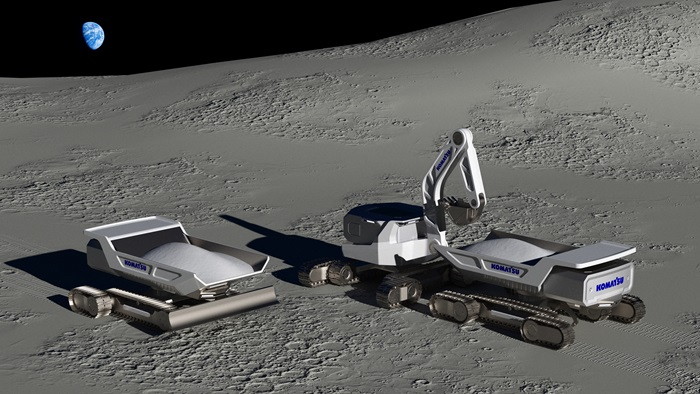
月面探査では、太陽電池タワーなどの重量物や、レゴリスの輸送を支える物流ローバーの役割が重要になる。従来のローバーは本体質量以下の積載量を想定していたが、月面での本格的な活動には積載量の多いローバーが求められる。
この研究では慶應義塾大学などと共同で、ローバー本体の質量を超えるペイロードの積載が可能な「積載能力強化型物流ローバー」の実現とプラットフォーム化を目指し、機能・システム要求の検討、走行可能な地上試験モデルの開発、デモンストレーションの実施、宇宙仕様化に向けた課題抽出などを行う。
コマツは、大きな荷重に耐えられることに加え、実用的な移動速度、岩などの障害物の乗り越え、急斜面の登坂などの高い走行性能を備えた小型・軽量の走行装置について、仕様検討・設計開発・試作などを担当する。
低重力下での挙動を模擬する試験機および自動掘削制御技術の研究開発(2年間)
月面では建機の重量も軽くなるため安定した掘削が難しいという課題がある。そのためコマツはデジタルツイン技術を活用し、月面重力環境下での掘削作業を仮想空間上でシミュレーションすることで、安定した掘削が可能な制御方法や建機構造を検討してきた。
この研究では、月面重力環境下と同様の振る舞いを模擬する掘削試験機と自動掘削制御技術を開発し、地上でフィールドテストを行う。シミュレーションでの検討内容を掘削試験機で検証するとともに、フィールドテストで得た知見により自動掘削制御技術の検討を深める。
宇宙環境下で使用可能かつ掘削の負荷に耐えうる電動アクチュエータの考案(2年間)
真空環境下の月面では通常の油圧システムが使用できないため、それに替わるアクチュエーターで掘削機械を動かすための検討も必要となる。この研究ではナブテスコと共同で、真空環境下でも使用可能な電動アクチュエーターの開発を行う。