2025年9月2日、鴻池組は、自社技術研究所でスリーブ検査システムと測量相番ロボットの公開実験を実施したことを発表した。
建設業界では、熟練技術者の高齢化や人手不足が深刻な課題となっている。従来のスリーブ検査や測量業務は複数人で行う作業であり、省人化、業務効率化が大きな課題となっていた。これらの課題への対応、また働き方改革推進の取り組みとして、今回2つの技術を開発した。

スリーブ検査システム「スリーブリング」
スリーブとは、鉄筋コンクリート造の建物において、配管や配線を通すためにコンクリート打設前に設ける筒状の穴のこと。スリーブ検査は職員や協力会社作業員が手作業で測定し、設計図面と照合していたため、膨大な時間と労力を要していた。
数百カ所に及ぶスリーブの径や取り付け位置の検査を行う必要があり、限られた時間内で効率の良い検査が求められることから、日本コンピュータシステムと共同でスリーブ検査システム「スリーブリング」を開発した。
スリーブリングは、AIとARを活用し、検査時間の大幅な短縮と検査精度の向上を実現する。検査で必要なものは、専用アプリをインストールしたタブレットと、一般向けプリンターで印刷可能なARマーカーのみで、運用時の用意・設置も容易である。
【検査手順】
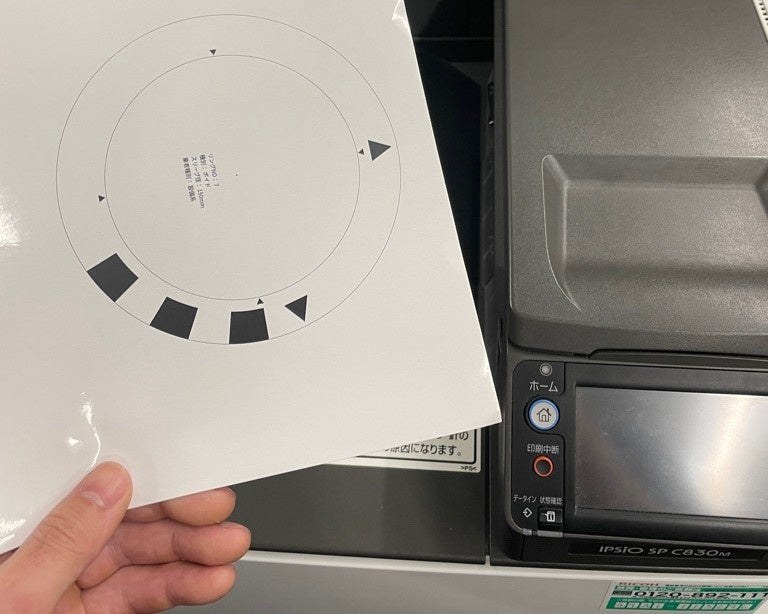



検査結果はウェブアプリを通じてリアルタイムに共有されるため、遠隔地から確認が可能。
このシステムにより検査時間を大幅に短縮し、AR上で設計データを重ね合わせることで、設計との整合性を瞬時に確認することができた。
測量相番ロボット「スタッフィー」
従来の測量作業は2人1組で行う必要があり、人件費や工数の増大につながっていた。建ロボテックと協力し、測量作業を自動化するロボット「スタッフィー」の開発に取り組んだ。
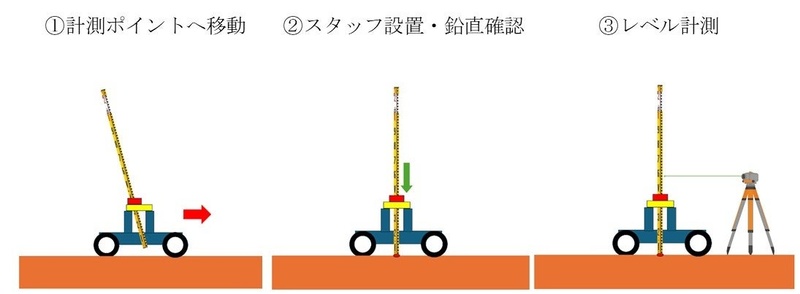
スタッフィーは、測量用スタッフを鉛直保持するための保持テーブル、スタッフ回転機構、スプレー装置、移動用駆動輪などの機構を備えている。遠隔操作用カメラシステムを搭載しており、ディスプレイ付きコントローラーによる遠隔操作が可能。
公開実験の結果、保持テーブルと回転機構により、スタッフの鉛直精度を維持し、目盛面が測量装置の方向に適切に向くことを確認した。従来の2人作業と比較して、オペレーター1人で作業ができるため省人化が可能となった。

鴻池組は、今回公開した技術の機能拡張や、他の建設作業への応用を検討するとしている。
公開実験の概要
| 日付 | 2025年8月29日(金) |
| 場所 | 鴻池組つくばテクノセンター(茨城県つくば市) |
| 主催 | 鴻池組 |
| 協力 | 日本コンピュータシステム、建ロボテック |