2019年12月18日、ヴイストンは、可搬重量約120kgを実現した研究開発用台車ロボットの超大型モデル「メカナムローバーG120」を発売することを発表した。
主な特徴
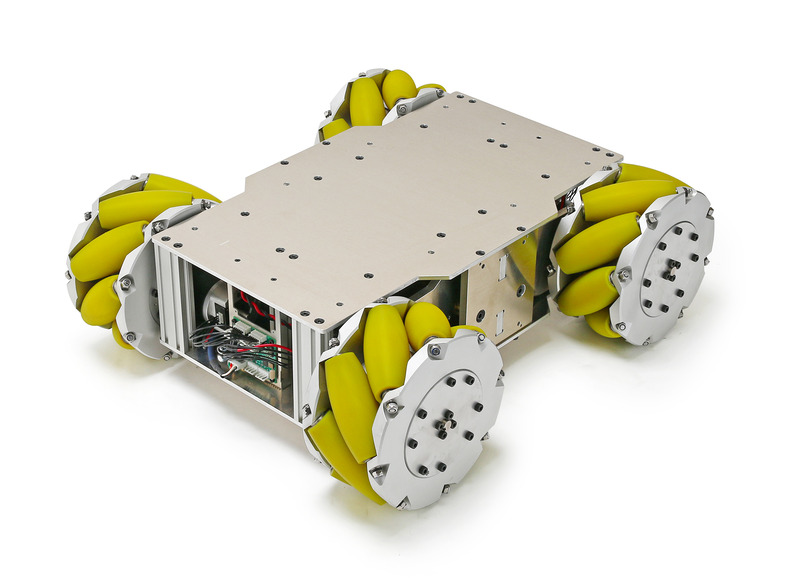
メカナムローバーG120は、 発売中のメカナムローバーの車体構造をベースにしつつ、車輪・モーター・制御基板・筐体構造の全てを見直し、可搬重量120kgを実現したモンスターマシンである。超大型の機体でありながら、ArduinoIDE対応、ROS対応といった特徴はそのまま備えているため、様々な研究、開発用途に幅広く対応が可能。
なお同製品は、2019年12月18日(水)~12月21日(土)の間、 2019国際ロボット展のヴイストンブースにて展示される。小間番号:S3-07(共同出展:i-RooBO Network Forum内)。
(1)可搬重量約120kgを実現
メカナムローバーG120は、大型のホイールやモーターを搭載することにより、シリーズ最大の可搬重量を実現した。大型の筐体にするため車体構造やバッテリなどを見直し、これまでと変わらない可用性を目指している。
既発売の同社製研究開発用台車ロボットにおいて、可搬重量をより大型なものにしたいというリクエストが多く、今回のメカナムローバーG120はそれらニーズに応えるもので、これまでは不可能であった研究、開発プロジェクトを現実のものとする。

※ 同製品は乗用を意図して設計されたものではない。また、大型の機体のため、開発や運用には十分な注意を。
(2)四輪メカナムホイールを搭載し、全方向へ移動が可能
メカナムホイールによる全方向への移動が可能。最高速度は実測値で1.3m/sとし、様々な研究、開発用途に対応することができる。
ステアリング機構を持たずに方向転換したり、機体の向きを変えずに真横に移動したりすることができるため、外部からの正確な位置制御が必要な用途などに特に適している。
(3) 有線 / 無線接続による制御
Wi-Fi / BLE / BluetoothClassicの3種の無線通信と、有線のUSBシリアル通信に対応している。指定のコマンドを用いることで、PCやタブレットなど、様々なデバイスから制御することが可能。
(4) ROSメッセージ通信でコントロール
ROSメッセージ通信に対応。ROSが動作するデバイスとWi-FiまたはUSBケーブルで接続することで、ROSを使った制御が可能となる。ROSメッセージ通信を使うことで、速度や旋回量の指令値を、数行のコードでメカナムローバーG120に送信することができ、ROSロボットとして幅広い活用が可能である。
導入ドキュメントと以下のサンプルプログラムが付属するため、初心者でもROS環境で制御システムを作成し、簡単に動かすことができる。LRFなどのセンサを用いた高度な制御を、少ない開発負担で実装することが可能である。
ROSを動作させるデバイスは別途用意する必要がある。同社で推奨するデバイスの動作環境は後述の通りである。
【 ROSサンプルプログラム一覧 】
・ ゲームパッドからの操作
・ マウス(タッチパッド)からの操作
・ SLAM(gmapping)
・ SLAM(cartographer)
・ navigation
※ 同製品に含まれないライブラリなどのセットアップが追加で必要になる場合がある。
※ SLAM、navigationを行うためにはLRFが必要である。LRFオプションも用意している。
| 【 ROS使用時の推奨動作環境 】 | ||
|---|---|---|
| OS | Ubuntu 16.04(64bit) | Ubuntu18.04(64bit) |
| ROS | ROS Kinetic | ROS Melodic |
| CPU | Core i5 7200U | Core i5 8259U |
| メモリ | DDR4 PC4-17000 4GB | DDR4 PC4-19200 8GB |
| ストレージ | SSD 128GB | M.2 SSD 256GB |
| グラフィック | Intel HD Graphics 620 | Intel Iris Plus Graphics 655 |
※ 上記条件を満たしていても、相性などにより正常に動作しない場合がある。
※ 仮想環境は、タイムラグにより安全な制御が行えない場合があり、推奨していない。
(5)Arduino IDEでプログラム可能
メカナムローバーG120の制御ボードである「VS-WRC051」には、ESP32-WROOM-32マイコンが搭載されている。そのため、Arduino IDEを用いてメカナムローバーG120の制御プログラムを作成することができる。製品付属のライブラリには、モータ制御関数や通信関数が含まれているので、少ない開発負担で制御プログラムを作成することが可能である。
※ VS-WRC051をArduino IDEを用いてプログラミングする場合、Arduino IDE 1.8.9以上が動作する環境が必要。
(6)専用の無線コントローラーで簡単操作
製品に付属するゲームパッド型無線コントローラー「VS-C3」を使えば、PC等を接続しなくても無線操縦することができる。アナログスティックを使用して、前後へ移動、回転させることが可能なので、手動操縦で動作させる際や、動作確認等に使用できる。
販売について
ヴイストンの公式Webショップで受注生産。
・ メカナムローバーG120 :オープン価格
製品ページ:https://www.vstone.co.jp/products/wheelrobot/
・ メカナムローバーG120用 LRFオプション /1式:100,000円(税別)
機体周囲の障害物等を検知するLRFを取り付ける注文時オプション。
・ メカナムローバーG120用 Raspberry Pi3Bオプション /1式:9,000円(税別)
Raspberry Pi 3Bを取り付けて出荷する注文時オプション。
拡張機器用電源基板オプションが別途必要。SDカードおよびOSイメージは付属しない。
・ 拡張機器用電源基板オプション /1式:30,000円(税別)
Raspberry Pi 3Bなどの拡張基板を搭載した際に、メカナムローバーG120本体のバッテリーから電源を供給する注文時オプション。Raspberry Pi 3B搭載時には必須となる。
構成図

本体仕様
| メカナムローバーG120 | |
|---|---|
| サイズ | W592×D497×H203(mm) |
| 積載重量 | 約120kg |
| 本体材質 | アルミニウム |
| バッテリー | 24Vシール鉛バッテリー 312Wh |
| 駆動方式 | 四輪駆動メカナムホイール、サスペンション搭載 |
| タイヤ直径 | 203mm |
| モーター | DCモーター 70W×4 |
| 回転検出 | エンコーダー |
| 最高速度(実測値) | 1.3m/s |
| 制御基板 | VS-WRC051 |
| SDK | VS-WRC051用 Arduinoライブラリ、ROSパッケージ |
| 収録サンプル ※製品に含まれないライブラリ などのセットアップが追加で必要 になる場合がある | ・Arduinoライブラリ 車輪制御/エンコーダー読み取り 各種通信機能等 ・ROS用サンプルコード ゲームパッドからの操作 マウス(タッチパッド)からの操作 SLAM(gmapping)/SLAM(cartographer) navigation |
| インターフェース | USBシリアル、Wi-Fi、Bluetooth Classic、BLE |
| 付属品 | 充電器、無線操縦セット |
| 注文時オプション | レーザレンジファインダー 拡張機器用電源基板 Raspberry Pi 3B |
※ 製品は屋内専用。屋外での使用は想定していない。また、製品の仕様は予告なく変更となる場合がある。
▼ ヴイストン販売サイト
https://www.vstone.co.jp/robotshop/